Mobile ALOHA:一种低成本的整体远程操作系统用于数据收集
划重点:
1. 💡 研究人员提出了一种低成本的整体远程操作系统,名为 Mobile ALOHA,用于收集关于整体远程操作的数据。
2. 💡 Mobile ALOHA 通过将其放在轮式底座上,扩展了原始 ALOHA 的功能,使其具有移动能力。
3. 💡 研究人员使用静态 ALOHA 数据集进行模仿学习,通过预训练和联合训练,实现了在移动操作任务中的良好性能。
研究人员从斯坦福大学对使用模仿学习进行整体远程操作的任务进行了研究。然而,这种方法在许多日常情况下需要整体远程操作的协调,包括移动和灵巧操作,而不仅仅是单个的移动或操作行为。
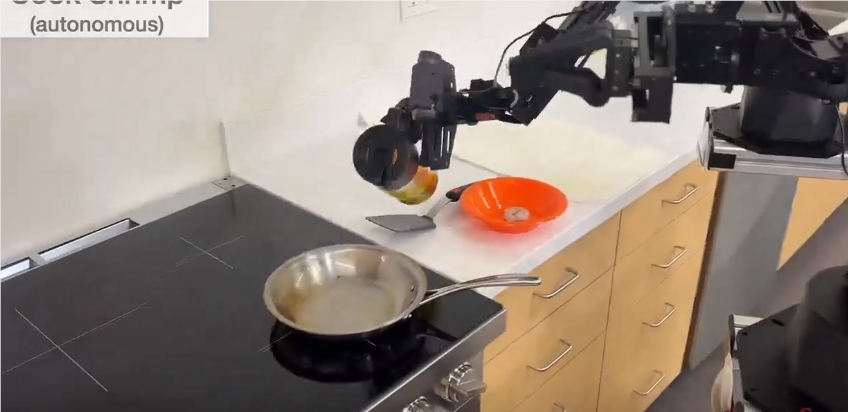
这项研究解决了在实现双臂移动操作的模仿学习中的两个关键问题。首先,他们引入了一种名为 Mobile ALOHA 的整体远程操作系统,该系统成本低廉,并设计用于收集双臂移动操作的数据。通过将 Mobile ALOHA 放置在轮式底座上,用户可以在物理连接状态下通过推动车轮来使底座移动,从而实现底座的独立移动,同时用户可以双手控制 ALOHA。研究人员通过同时记录手臂操作和底座速度数据来创建整体远程操作系统。
研究团队指出,通过简单地连接底座和手臂的动作,然后进行直接模仿学习,可以获得模仿学习中的出色表现。他们通过将移动底座的线性和角速度与 ALOHA 的14个自由度关节位置结合起来,创建了一个16维动作向量。这种表达方式几乎不需要实现改变,使得 Mobile ALOHA 能够直接受益于之前的深度模仿学习方法。
研究人员指出,目前几乎没有可用的双臂移动操作数据集。然而,受到在各种机器人数据集上进行预训练和联合训练以进一步提高模仿学习性能的最近成功的启发,他们开始使用静态双臂数据集。具体而言,他们通过引入 RT-X 来使用静态 ALOHA 数据集,该数据集包含825个与 Mobile ALOHA 任务无关的活动,并且两只手臂分开安装。
尽管任务和形态上存在差异,但研究表明,在几乎所有移动操作任务中都可以实现积极的迁移,达到与仅使用 Mobile ALOHA 数据训练的策略相当或更高的性能和数据效率。此外,这一观察结果也适用于其他类别的最先进的模仿学习技术,如 Diffusion Policy 和 ACT。
这种模仿学习的结果对于许多复杂的活动也很有效,包括拉椅子、联系电梯、打开两门壁柜来存放沉重的烹饪锅,以及清理溢出的酒。每项任务只需50个人类示例,协同训练就可以让我们获得超过80% 的性能,与没有协同训练相比,平均绝对提高34%。
项目网址:https://mobile-aloha.github.io/
Salesforce调查显示:近50%的人不信任企业会合乎道德地使用AI
文章概要:1.Salesforce针对1.4万消费者和企业买家调查发现,企业采用AI与消费者之间可能存在着很大的信任差距。2.调查显示,尽管客户普遍开放AI用途,但近50%的人不信任企业会合乎道德地使用AI。3.调查建议企业提高透明度、人工验证结果、给客户选择权等以赢得消费者信任。站长网2023-08-29 11:16:540000京东双十一战报:开售10分钟下单用户数及成交订单量同比增长均超4倍
昨日晚间,京东公布了双十一战报。据悉,京东双十一开售10分钟下单用户数、成交订单量同比增长均超4倍。今年京东11.11为广大消费者带来了超5亿件新品。iPhone、小米、荣耀、华为、OPPO、一加、vivo手机成交额1秒破亿。2K屏幕游戏笔记本、台式机、组装电脑成交额同比增长均超200%。站长网2023-10-24 21:37:220000GPT-4 生成的投资推介材料获资金支持概率高出人类 3 倍
获得投资者资金对许多企业的成功至关重要。但这并不容易。商业人士经常向投资者展示精心准备的演示文稿,然而很多时候投资者并不感兴趣。而ChatGPT不仅可以帮助吸引投资者,还能使他们投入更多资金。为投资者创建推介材料是一项艰巨的任务,因为它们必须以引人注目的方式展示公司的最新成就,以吸引投资。这涉及呈现一个思考周到、有前景的商业计划和发展轨迹。站长网2023-06-13 23:54:070000清华等开源多智能体框架AgentVerse 可让多个模型之间进行协作
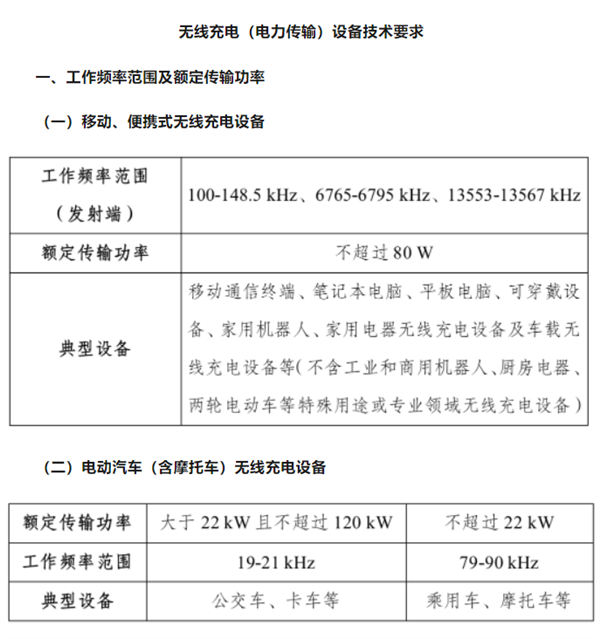
要点:1.AgentVerse是一个多智能体框架,旨在促进大型语言模型之间的协作,以提高任务完成效率。2.AgentVerse框架包括专家招募、协同决策、行动执行和评估四个关键阶段,模拟人类群体问题解决过程。3.实验结果表明,AgentVerse框架能够有效部署多智能体群组,性能优于单一智能体,促进了协作等社会行为。站长网2023-09-22 09:23:050002工信部发布无线充电新规:手机等不能超80W
快科技5月30日消息,工信部近日印发《无线充电(电力传输)设备无线电管理暂行规定》,2024年9月1日起施行。本规定适用于生产或者进口在国内销售、使用的移动通信终端无线充电设备、便携式消费电子产品无线充电设备,以及电动汽车(含摩托车)无线充电设备。站长网2023-05-31 09:12:510004