能像真人一样丝滑操作
腾讯机器人研究登顶刊 能像真人一样丝滑操作
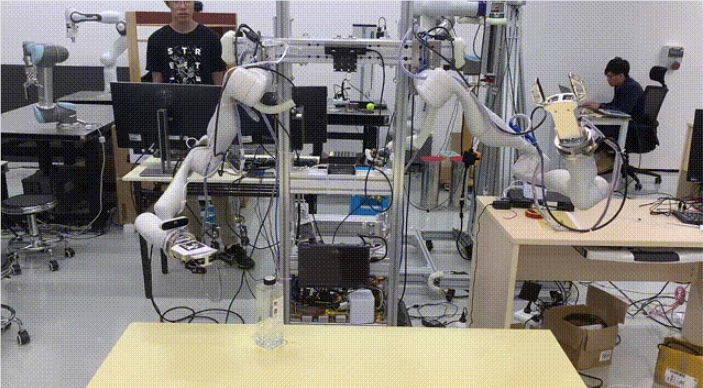
要点:腾讯RoboticsX实验室研发的通用双臂协同灵巧操作框架已发表在《IEEETransactionsonRobotics》上,具备丝滑操作、高抗干扰能力和人类协同的特性。该框架解决了通用双臂系统面临的视觉感知、动态协同和人机技能迁移等问题,通过学习和优化两个关联子框架实现了双臂操作的安全和灵活度。站长网2024-03-26 16:56:110000

热点
《封神2》崩的越惨,DeepSeek的刀就越锋利。
2025-02-06 18:40:06iPhone用户警惕!苹果App Store首次发现OCR恶意软件:悄无声息窃取资料
2025-02-07 03:21:16一周打赏20万,各个品牌为做“榜一大哥”正在疯狂撒钱。
2025-02-06 18:38:10模型优惠进入倒计时 DeepSeek因服务器暂停API服务充值
2025-02-07 03:18:38过年三件套平替爆火:商家月入200万,订单“根本发不完”
2025-02-06 01:10:59小米眼镜官微上线:智能眼镜赛道要爆发
2025-02-07 02:59:11一个行业的AI样板:教培的不同环节怎么被改写
2025-02-05 23:37:52这个春节大家都在看什么?哪吒创影史纪录,DeepSeek刷屏全网
2025-02-07 02:48:00黄仁勋喊话年轻人:学会用AI 才能更出色
2025-02-05 23:36:32告别5美元包邮,Temu和Shein还是比亚马逊便宜
2025-02-07 02:47:51
关注

小鹏G9/G6正式登陆爱尔兰/芬兰:加速欧洲市场布局
2025-02-04 09:36:20《哪吒2》登顶,谁赚麻了?
2025-02-07 15:41:39小米汽车门店已有216家门店:覆盖全国64城
2025-02-04 09:33:18雷军去小米汽车工厂上班了:确认要进一步提产 冲击年销30万辆
2025-02-07 15:06:26三星Exynos 2500芯片确认于2025年下半年推出:性能不及骁龙8 Elite
2025-02-04 07:34:04小米眼镜官博上线 旗下首款AI眼镜将发布
2025-02-07 10:20:34
DeepSeek创始人老家成热门打卡地:家长带着孩子拍照打卡
2025-02-04 07:31:46
模型优惠进入倒计时 DeepSeek因服务器暂停API服务充值
2025-02-07 03:18:38
硅谷掀桌!DeepSeek遭OpenAI和Anthropic围剿,美国网友都看不下去了
2025-02-02 16:49:29
小米眼镜官微上线:智能眼镜赛道要爆发
2025-02-07 02:59:11

