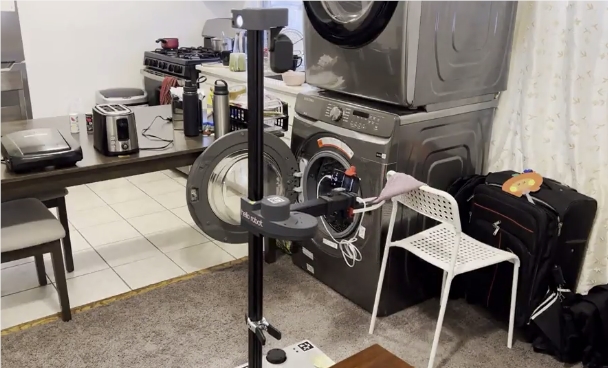
家庭机器人操作学习的开源通用框架
纽约大学和Meta研究人员推出Dobb-E:家庭机器人操作学习的开源通用框架
**划重点:**1.🚀Dobb-E是一款高度适应性的系统,能够从用户演示中学习和适应,成功率达到81%。2.🏡通过利用iPhone功能,研究团队构建了一个独特的家庭和第一人称机器人交互数据集,突显其在真实环境中的高效性。3.💡Dobb-E的成功归功于简单而强大的方法,包括行为克隆和用于动作预测的两层神经网络。站长网2023-12-04 10:46:220000

热点
换个名字获客成本降到不足1美金,“大神”又推火了一个AI App?
2025-02-18 09:52:20大模型都喜欢拍马屁,Gemini最能拍!斯坦福:这不安全、不可靠
2025-02-16 10:00:30马化腾再次短暂登顶中国富豪榜 腾讯AI、游戏领域表现亮眼
2025-02-18 09:44:50Perplexity免费推出Deep Research:性能超过R1、o3-mini等,CEO:感谢DeepSeek
2025-02-16 09:57:42腾讯产品疯狂接入DeepSeek,哪个最好用?| AI新榜实测
2025-02-18 09:40:04DeepSeek官方推荐:R1要这样设置
2025-02-16 09:44:04单月涨粉破百万,小红书迎来开门红
2025-02-18 09:18:45首家!联想moto手机正式接入DeepSeek-R1满血版
2025-02-15 17:25:27AI+再升级!最强地级市下了一盘大棋
2025-02-18 09:14:00宇树G1机器人算法升级:任意舞蹈任意学 扭腰、交叉步行云流水
2025-02-15 17:19:24
关注
对于那些出来卖的DeepSeek课程,我有些话想说。
2025-02-11 18:23:40换个名字获客成本降到不足1美金,“大神”又推火了一个AI App?
2025-02-18 09:52:20周鸿祎:雷军上来就推高端车做对了 看能否成为中国马斯克
2025-02-11 18:15:14马化腾再次短暂登顶中国富豪榜 腾讯AI、游戏领域表现亮眼
2025-02-18 09:44:50也别只盯着DeepSeek,这些AI工具也能让你早下班2小时
2025-02-11 18:14:45
腾讯产品疯狂接入DeepSeek,哪个最好用?| AI新榜实测
2025-02-18 09:40:04
是不是好AI,DeepSeek得过玄学关
2025-02-11 17:58:03
单月涨粉破百万,小红书迎来开门红
2025-02-18 09:18:45三星Galaxy S25系列正式发布 Ultra顶配版售价13199元
2025-02-11 17:48:17AI+再升级!最强地级市下了一盘大棋
2025-02-18 09:14:00