中科院提出全新多视图世界模型和自动驾驶世界模型Drive-WM
要点:
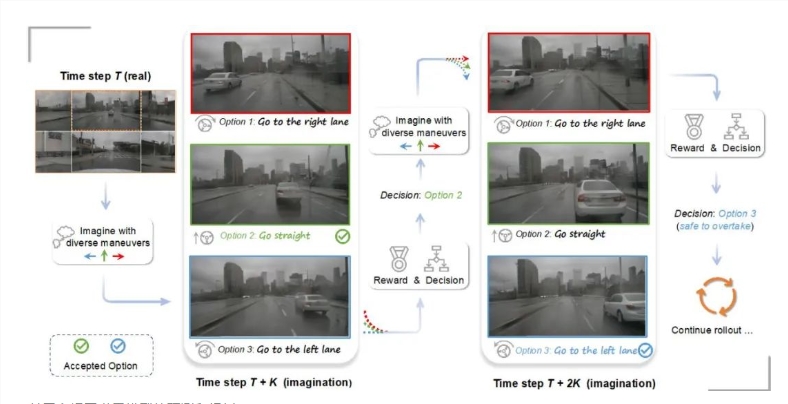
由中科院自动化所研究团队提出的 Drive-WM 模型结合多视图世界模型,利用 Diffusion 模型生成逼真视频场景,为自动驾驶系统提供多视图预测和规划,极大提高安全性。
Drive-WM 模型首次将世界模型与端到端规划相结合,利用世界模型在每个时间步上预测未来情景,通过图像奖励函数全面评估,实现更安全、有效的规划。
Drive-WM 的生成能力提供新思路,特别是在面对 Out-of-Distribution(OOD)场景时,通过生成视频进行微调,使规划器在复杂场景中表现更佳,揭示了未来场景评估对规划的提升作用。
随着自动驾驶技术的迅猛发展,中科院自动化所的团队提出的 Drive-WM 模型成为自动驾驶领域的关键创新。这一模型通过多视图世界模型,利用生成式世界模型的强大生成能力,实现了多视图预测和规划,为自动驾驶系统的安全性提供了新的保障。在 CVPR2023自动驾驶研讨会上,Drive-WM 模型引起了广泛关注。
该模型不仅突破了世界模型与端到端规划的整合,还在面对 OOD 场景时表现出鲁棒性。通过对比实验,作者揭示了目前端到端规划器在面对 OOD 情况时的不足之处,而 Drive-WM 模型则通过生成视频进行学习,提高规划器在复杂场景中的性能。
论文地址:https://arxiv.org/pdf/2311.17918.pdf
此外,Drive-WM 还展示了其多视图视频生成的出色能力,通过引入时序层的编码和视图分解建模,实现了时空一致性。论文详细描述了模型的设计和控制选项,包括使用文本、场景布局、运动信息来控制多视图视频的生成,展示了其高质量和可控性。
Drive-WM 对于自动驾驶系统有着潜在影响,世界模型与端到端规划的结合将提高自动驾驶的安全、稳定和可靠性。这一技术突破有望推动自动驾驶领域迈向新的里程碑。
小红书博主用AI画出无价的饭获赞21.9万 网友感动哭
近期,一种新的ChatGPT文生图玩法在海外社交媒体平台上引起了轰动,即在提示词中输入“Makeitmore”,从而引发AI创作出丰富的想象力。这一新形式的内容创作近期持续走红,产生了许多爆款,比如一名男孩因收到圣诞礼物是煤炭而气得用空袭炸了圣诞老人的家,相关视频在YouTube上播放量高达203万次,并获得了13万个赞。同样,另一则小朋友吵架吵到宇宙爆炸的故事在小红书上获得了13.7万个赞。站长网2023-12-27 15:09:4600002024年结束,哪里是原创动画的应许之地?
2024年即将落幕,这一年国产动画市场逐渐呈现出清晰且多元的态势。视频平台依旧是动画行业的重要力量,各家平台有的以“爽文漫”吸引观众,有的深耕“新国风”赛道,有的依靠大IP与大制作,在异能和科幻题材中持续发力。市场上IP改编作品依旧是主流。行业早早就有了共识,依靠IP,动画作品成功率相对稳定,原著受众作底,动画视听吸引新观众,最终圈层融合实现商业变现。站长网2024-12-23 14:19:380000小米回应“小米SU7刹车故障”:软件误识别 已修复
快科技5月13日消息,针对网传小米SU7刹车故障”一事,小米集团公关部总经理王化今日发文进行回应。王化表示,经核实,的确是软件误识别,目前已经将这一小概率事件进行修复,大家不必惊慌。以下是王化找汽车部的工程师帮忙梳理的情况:经分析确认,车辆当时为制动主控制器(DPB/BCP)的系统误识别降级触发备用制动策略,制动辅控制器(ESP/BCS)直接响应制动需求为车辆提供刹车减速的情况。站长网2024-05-13 17:57:010000字节发布ResAdapter 可以解决Stable Diffusion肢体异常、画面崩坏问题
近日,字节发布了一款名为ResAdapter的新型工具,该工具可以解决StableDiffusion(SD)在生成超大图片以及非训练分辨率图片时出现的肢体异常和画面崩坏问题。此外,ResAdapter还可以与现有的IPadapter以及Controlnet模型兼容。站长网2024-03-06 14:20:440003AI一句话生成思维导图!TreeMind树图上线 支持分屏视图,多人协作
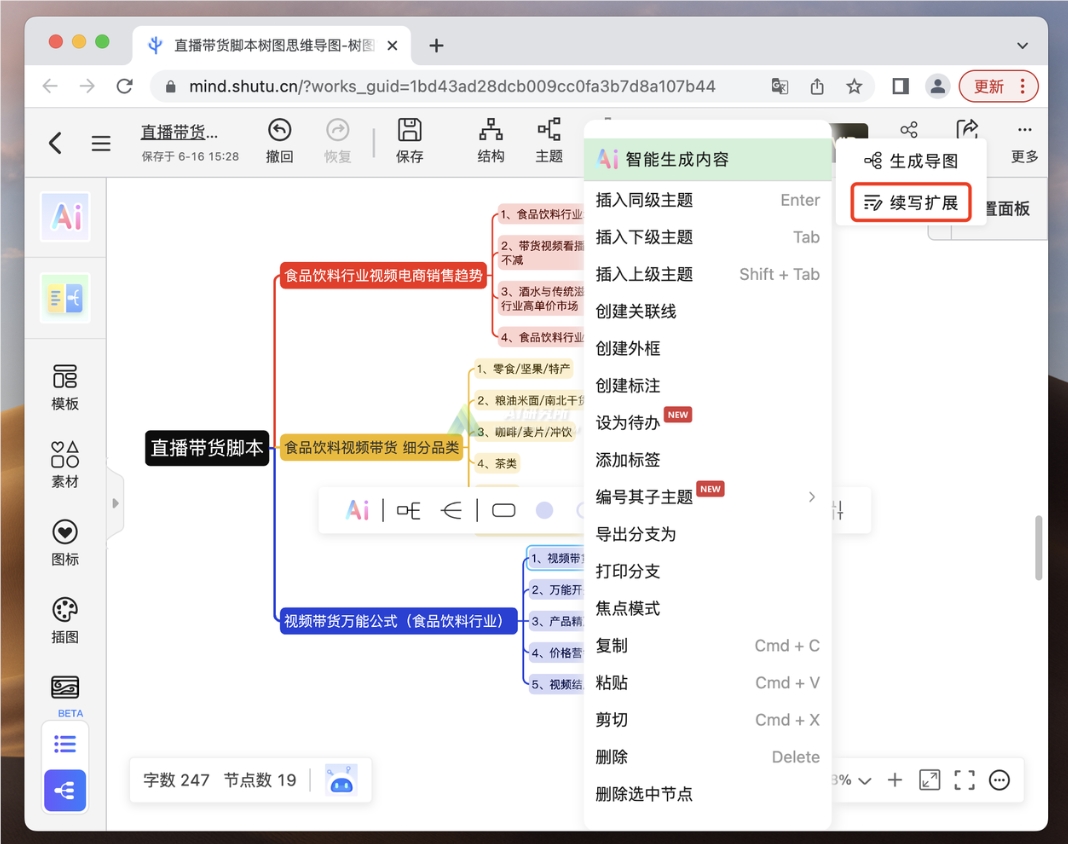
在互联网时代,面对裁员危机和工作压力,思维导图成为提高学习和工作效率的利器。TreeMind树图可以通过一句话生成清晰连贯的思维导图,支持随意修改和拓展,帮助用户专注头脑风暴。它提供丰富的模板,覆盖多个行业,是思维导图领域的“百科全书”。站长网2023-07-20 12:59:270000