北大全新「机械手」算法:辅助花式抓杯子,GTX 1650实现150fps推断|NeurIPS 2023
手是人类与世界交互的重要部分,手的缺失(如上肢残障)会大大影响人类的正常生活。

北京大学董豪团队通过将扩散模型和强化学习结合,使机械手能根据人手腕部的移动轨迹,自适应的抓取物体的不同部位,满足人类多样化的抓取需求,目前该工作已被NeurIPS2023接收。
论文地址:https://arxiv.org/abs/2309.06038
项目主页:https://sites.google.com/view/graspgf
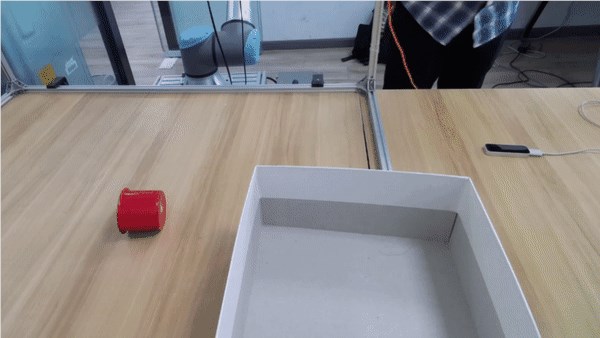
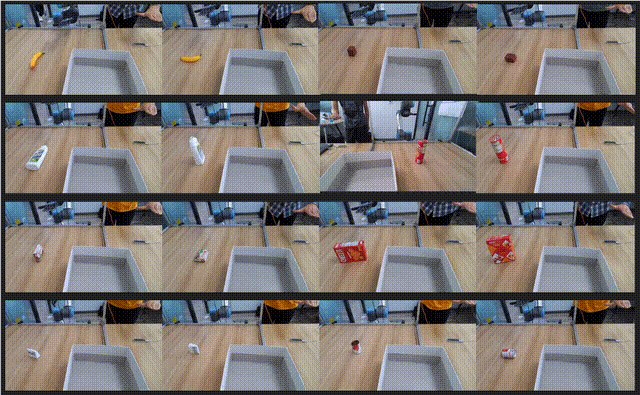
有了这个机械手,只要动动手腕,机械手就能按照人类想要的方式抓起物体,比如抓取杯身和杯壁。

由于人类行为的复杂与多变性和真实世界物体的多样性,仅仅根据人手腕部的移动轨迹来不断预测人类想法是一件非常困难的事情。
新方法真正实现了灵巧的抓取,能在真实世界中对于不同的物体,不同的抓取姿态,不同的抓取轨迹进行泛化。
机械手如何明白人类的想法?
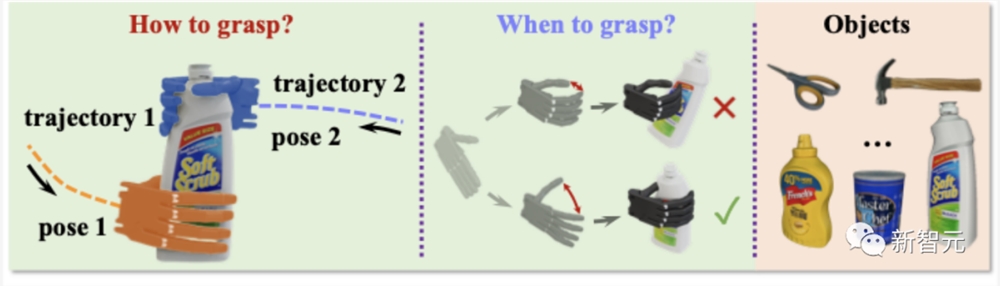
北大董豪团队提出将人类的想法分解成两个部分:
1. 如何抓: 考虑到人类和物体当前的相对姿势,机械手应该如何抓取物体?
2. 何时抓: 机械手应该根据用户历史运动轨在何时、以什么速度执行抓取动作?
如何抓?
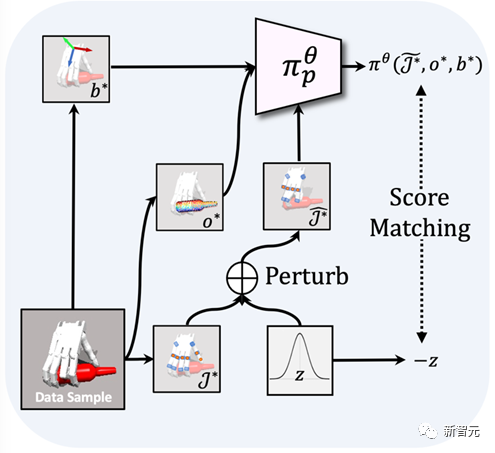
首先,如上图所示,新方法将学习人类想要「如何抓取物体」,定义为从一个包含各种抓取姿态的数据集中,学习抓取梯度场Grasping Gradient Field(GraspGF)。
基于当前人手腕部和物体的相对关系,GraspGF会输出一个梯度,这个梯度代表最快提高「抓取可能性」的方向。这个梯度可以转化为对每个手指关节的原始控制,使手指能够通过不断迭代达到适当的抓取姿态。
这样的梯度场可以随着人手腕部和物体的关系的变化,而不断的输出新的梯度指示当前人类的抓取意图,即意向抓取的物体区域及抓取姿态。
GraspGF随着手腕的旋转,不断调整抓取姿态
何时抓?

GraspGF的动作会导致提前合拢
然而,只知道「如何抓」并不够完备,如果不知道要「何时抓」(如上图所示),虽然最终的抓取姿态是合理的,但是在达到抓取姿态的过程中会和物体发生碰撞。
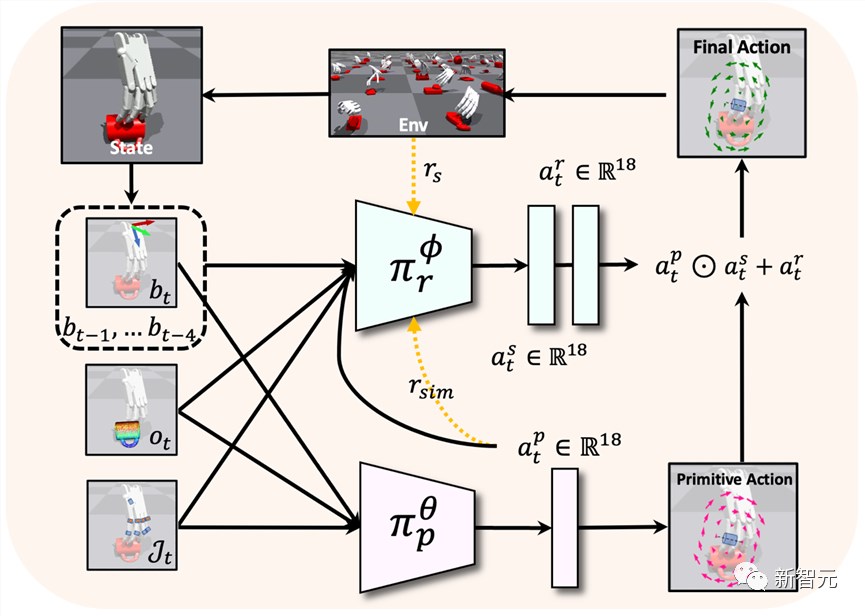
如上所示,为了解决「何时抓取」的问题,新方法还训练了一个基于强化学习的残差策略,它首先会输出一个「缩放动作」,根据手腕轨迹的历史,决定手指关节应该以多快的速度沿着原始动作的方向移动。
此外,因为原始策略是基于最终抓取姿态数据集离线训练得到的,原始策略并不了解环境的物理约束 ,残差策略还会输出一个「残差动作」来进一步校正原始动作。
通过结合残差策略,模型能够通过残差策略学习到的「何时抓」更好地实现原始策略学习到的「如何抓」。
简单的奖励函数
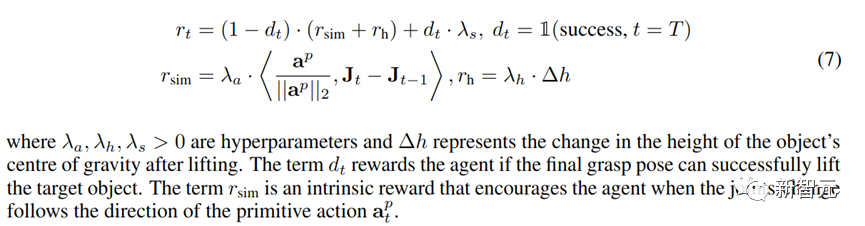
该方法在奖励函数的设置上不需要过多的human design,因为原始动作已经提供了一个比较好的「如何抓」的引导,在训练强化学习模型时,除了给定成功抓取和抓取后的高度变化奖励,仅仅只需要一个奖励函数去鼓励机械手跟随原始动作即可。
该方法的优势
该方法仅需要成功抓取的抓取姿态数据集用于训练,与需要专家演示的方法相比,不需要大量的人工标注或者工程工作。
GraspGF借助了扩散模型强大的条件生成建模能力,这使它能够根据新颖的用户意图输出有效的原始动作。
残差学习的设计改善了强化学习探索效率低下的问题,提升了强化学习模型在未见过物体和轨迹上的泛化能力。
结果
最终在4900多个物体,200条不同的人类移动轨迹上,新方法都优于基准。
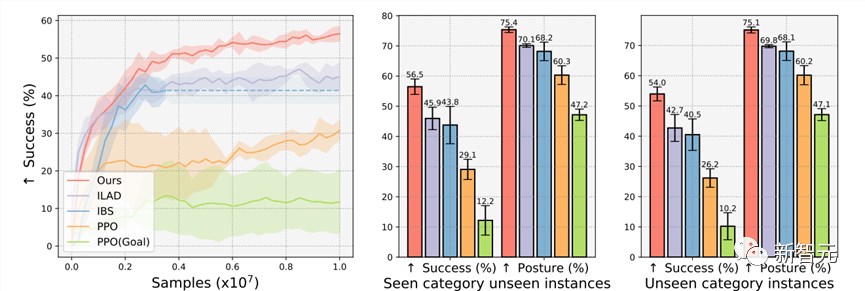
该方法的最终的抓取姿态相比于基线更符合人类的抓取意图。
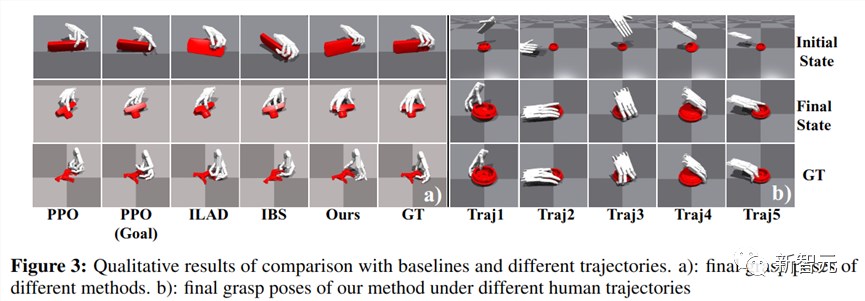
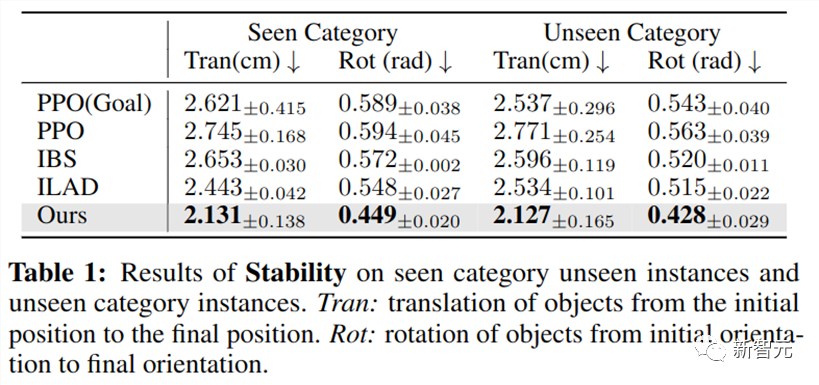
此外,该方法在抓取过程中对物体造成的扰动要小于其他基准。
经过测试,该模型在GTX1650的显卡上,能达到150fps的推断速度,能做到与人类的实时交互,也许未来能真正用于辅助手部缺失的人更好地进行日常生活。
本次研究的通讯作者董豪是北京大学的助理教授、博导、博雅青年学者、智源学者,其创立并领导北大超平面实验室(Hyperplane Lab)。
董老师在NeurIPS、ICLR、CVPR、ICCV、ECCV、ICRA、IROS等国际顶尖会议/期刊上发表论文40余篇,Google Scholar引用4700余次,多次担任国际顶尖会议如NeurIPS、CVPR、AAAI、ICRA的领域主席和副编委。
其领导了多个开源项目,例如TensorLayer和OpenMLsys,出版书籍获得15万次下载,开源软件获得上万Github Star,获ACM Multimedia 最佳开源软件奖、OpenI杰出项目奖。
论文一作吴天昊,现为北京大学博士生,导师为董豪老师,研究方向为灵巧手操纵算法。
超火迷你GPT-4视觉能力暴涨,GitHub两万星,华人团队出品
GPT-4V来做目标检测?网友实测:还没有准备好。虽然检测到的类别没问题,但大多数边界框都错放了。没关系,有人会出手!那个抢跑GPT-4看图能力几个月的迷你GPT-4升级啦——MiniGPT-v2。△(左边为GPT-4V生成,右边为MiniGPT-v2生成)而且只是一句简单指令:[grounding]describethisimageindetail就实现的结果。站长网2023-10-19 09:09:280000哈佛研究: GPT-4 可将工作质量提升超过40%!
划重点:-哈佛商学院的研究发现,GPT-4能够将员工的工作质量提高超过40%。-不熟练地使用AI可能会降低工作绩效高达19个百分点。-研究还区分了AI用户为“半人半马”和“半机械人”,探讨了不同的AI合作方式。根据来自哈佛商学院的一项新研究,GPT-4语言模型可以显著提高员工的工作质量,提高超过40%。然而,研究也发现,不熟练地使用人工智能可能会导致工作绩效下降高达19个百分点。站长网2023-10-16 11:24:210004三星加入 AI 芯片代工竞赛:为 Groq 生产 4nm AI 加速芯片
站长之家(ChinaZ.com)8月15日消息:美国的AI芯片公司Groq日前宣布,三星代工的Taylor工厂将生产它的4纳米AI加速器芯片。Groq的创始人兼CEOJonathanRoss表示,与三星的4nm工艺合作将为Groq带来技术飞跃。站长网2023-08-15 17:22:560000AI视野:OpenAI暂停ChatGPT Plus用户注册;Bing Chat将推离线模式;C站获510万美元融资;AI智能导购助手京东京言上线
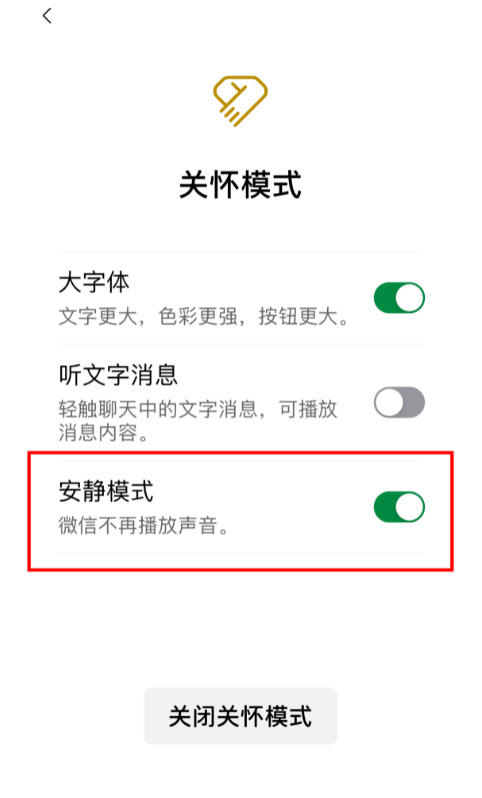
📰🤖📢AI新鲜事OpenAI暂停ChatGPTPlus用户注册由于ChatGPT的激增使用量导致服务器负担过大,OpenAI决定暂停新用户注册ChatGPTPlus账号,以确保服务稳定。【AiBase提要:】😓服务器承受范围超负荷:近期ChatGPT使用量激增,导致公司服务器超负荷,服务不稳定。站长网2023-11-15 21:32:170002微信宣布上线“安静模式” iOS版本可体验
今日,微信宣布上线了一个新功能,“安静模式”。在iOS微信更新到最新版本,通过“微信”-“我”-“设置”-“关怀模式”-“安静模式”,就能开启。之后,微信在消息通知、音视频通话、视频号内容播放等所有场景下,都不会再发出声音。微信表示,“安静模式”可以为聋人自如地玩手机创造更好的环境。“安静模式”下,一切无声,但如果你需要临时开启声音,可以点击手机“”音量:站长网2023-06-20 17:10:370002