强大的机器人视觉学习框架GROOT 帮助机器人更好地理解环境
要点:
1. Imitation Learning (IL)在教授神经网络基础的视觉动作策略以执行复杂操作任务方面取得了成功。
2. GROOT是一种独特的模仿学习技术,通过构建面向视觉的操纵任务的强策略,解决了在不断变化的背景、摄像机角度和对象引入等真实世界环境中的问题。
3. GROOT使用物体中心的3D表示来帮助机器人更好地理解环境,具有出色的泛化能力,可适应不同的背景、摄像机角度和新的物体。
随着人工智能的普及和使用增加,模仿学习(IL)已被证明是教授神经网络视觉动作策略以执行复杂操作任务的成功技术。然而,构建能够执行各种操纵任务的机器人一直是机器人学领域的难题,因为机器人在现实世界中面临着各种环境因素,包括不断变化的摄像机视角、背景和新物体的出现。这些感知差异经常成为传统机器人方法的障碍。
项目地址:https://github.com/UT-Austin-RPL/GROOT
为了解决这个问题,来自德克萨斯大学奥斯汀分校和索尼AI的研究人员最近推出了GROOT,这是一种独特的模仿学习技术,专注于构建面向视觉的操纵任务的强策略。
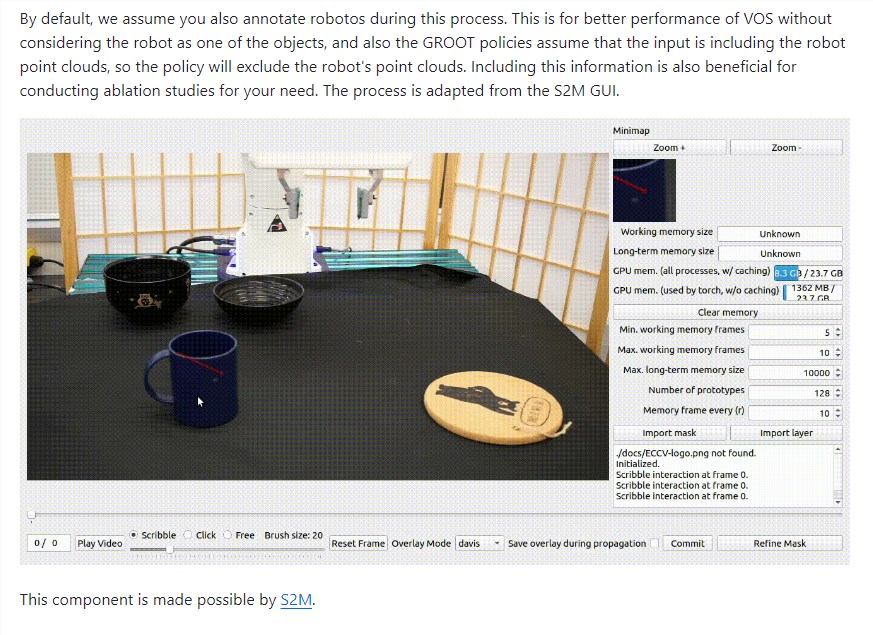
GROOT的创新核心是开发物体中心的3D表示,以引导机器人的感知,帮助它集中注意力在任务相关的元素上,并消除视觉干扰。GROOT通过基于变压器的方法来对这些物体中心的3D表示进行推理,能够高效地分析这些3D表示并做出判断,这对于赋予机器人更复杂的认知能力是一大进步。
GROOT具有出色的泛化能力,能够适应初始训练环境之外的情况,包括不同的背景、摄像机角度和以前未见过的物体的存在。这与许多机器人学习技术在这些环境中表现不佳的情况形成了鲜明对比。因此,GROOT是解决机器人在实际世界中面临的复杂问题的杰出解决方案。
总之,GROOT在机器人视觉和学习领域是一项重大的进步,它注重在真实世界环境中的鲁棒性、适应性和泛化能力,为许多应用提供了可能性。通过解决机器人在动态环境中的鲁棒操纵问题,GROOT使机器人能够在复杂和动态的环境中高效运行。这一研究的突破对于机器人领域具有重要意义。
Stack Overflow 调查显示开发人员已准备好使用 AI 工具辅助编程
AI工具在编码问答网站StackOverflow的开发者调查中被发现正变得普遍,尽管编码人员对其准确性持怀疑态度。这项调查在该网站正面临处理AI生成内容引发的版主罢工时进行,对其来说正值一个有趣的时刻。调查发现,77%的受访者对在工作流程中使用AI持积极态度,70%的人已经使用或计划在今年使用AI编码工具。站长网2023-06-16 14:38:5900002023 年 AI 助手的崛起,交互式人工智能将于 2024 年问世
2023年,ChatGPT、Bard和Llama等人工智能(AI)聊天机器人崭露头角,承诺将使世界变得更高效,但也可能导致数百万人失业。这些AI助手已帮助全球用户生成通常需要人类更多小时才能完成的内容。尽管如此,目前尚未发生大规模裁员。过去一年中,涌现出数十种专门用于应用编码、视频和图形内容制作或音乐创作的替代产品。聊天机器人的局限性0000AI绘画巨头Stable Diffusion背后的公司也要缺钱了
StableDiffusion背后的公司StabilityAI为AI行业发展出了不少力。据报道,这家公司资金也将要用完了。据了解,总部位于伦敦的初创公司StabilityAI成立于2019年,被视为OpenAI的DALL-E2和Midjourney的更开放的对手,这在很大程度上是因为其开源图像生成器StableDiffusion的存在。站长网2023-04-13 10:15:190001《黑神话:悟空》发售日,我们记录了66个与它有关的数字
踏平坎坷成大道,斗罢艰险又出发。历经上千个日夜的漫长等待后,北京时间2024年8月20日上午10时,由游戏科学出品、以中国神话为背景的动作角色扮演游戏《黑神话:悟空》如期解锁。在这个令中国游戏圈震动沸腾的日子里,我们尝试记录下66个和这款游戏有所关联的数字,以此见证这颗世人渴盼的奇石,与它所激起的千层波澜万重浪。站长网2024-08-21 08:50:560000马云指出淘宝天猫未来三个方向 努力适应当前激烈的竞争环境
近几个月来,退休的马云多次亮相,与他的个人生活相关,但他一直关注着阿里。据报道,今年5月底,马云召集了淘天集团的各业务负责人,进行了一次小范围的沟通会议,会议的细节正在逐渐公开。参加这次会议的人包括淘天集团CEO戴珊、行业发展负责人汪海、刘鹏、刘一曼、淘宝直播负责人程道放、淘天集团CFO李博以及菜鸟集团CEO万霖。站长网2023-06-21 14:36:170002