Mujoco3开源:物理仿真器速度更快 稳定性大大提高
站长网2023-10-20 10:07:251阅
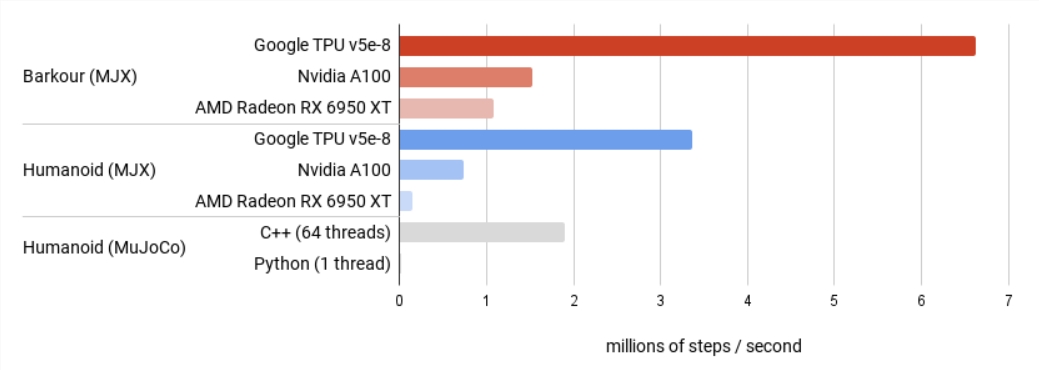
DeepMind宣布最新版本的MuJoCo3,该版本引入了加速硬件支持,对CPU进行了性能和内存占用的改进,以及更多灵活的碰撞原语。MuJoCo3支持通过新的MuJoCo XLA(MJX)模块进行加速模拟,可以在Google Cloud TPU或自有加速硬件上以每秒数百万步的速度运行MuJoCo模拟。MJX通过运行在专门的硬件上,提供独特的性能特点,但可能需要一些模型调整。
MJX支持多个硬件供应商,包括Nvidia、AMD和Apple Silicon GPU,以及Google Cloud TPU。MuJoCo在小型和中型场景中具有无与伦比的速度,但在大型场景中处理上百个机器人或自由物体时性能不佳。对于基于CPU的MuJoCo,他们已经在这方面取得了显著的进展。
项目地址:https://github.com/google-deepmind/mujoco/discussions/1101
MuJoCo支持小型和中等规模场景的高速仿真,但对于大规模场景,如拥有数百个机器人或自由物体的大型建筑,处理能力有限。MuJoCo3为CPU-based MuJoCo引入了显著改进,以实现对大型场景的全面支持。
同时,MuJoCo已经使用稀疏代数来处理大型模型,但某些关键矩阵使用了密集内存分配,导致很大的模型无法在可用内存中运行。MuJoCo3通过内存压缩的方式,减少了内存占用,提高了效率。
MuJoCo3引入了“碰撞岛”概念,用于加速单个大型场景的仿真。这种方法可以将不互动的子组件分配到独立的岛屿中,从而实现多线程并行计算,提高性能。
MuJoCo3的发布代表了深度思维在机器人模拟领域的持续进展,提供了更多的性能和功能,为模拟和强化学习等领域的研究和开发提供了更强大的工具。
0001
评论列表
共(0)条相关推荐
余承东官宣享界S9开启先行尊享计划:入围可优先交付并获高级赠品
快科技7月26日消息,华为车BU董事长官宣享界S9开启先行尊享计划,将面向早期预订的用户,限额5000名优先交付,成功入围即可享受优先交付等先行尊享权益。活动规则如下:1、按照活动配置预订或改配并在正式上市发布后48小时内确认订单,即被视为成功参与;2、会按照预订的顺序,分批次向成功参与的用户发送入围通知,直至名额用完为止;3、已入围用户需在确认订单后五天内确认交付方案,否则视为放弃名额;站长网2024-07-26 17:58:090000Picsart 推出 20 多个人工智能工具来加速数字内容创作
据国外媒体报道,软银支持的Picsart正在将业务重心从传统照片编辑转向AI驱动的内容创作。该公司最近发布了Ignite,这是一套包含20多种AI工具的套件,旨在激发企业和个人的创造力,并加速数字内容的制作。站长网2023-11-17 10:09:540000四面出击的智谱:这家最像OpenAI的中国公司在干什么
最像OpenAI的中国公司位于清华科技园中的Ricci睿奇餐厅提供了从披萨到意面的各种西式简餐,午餐时段这里熙熙攘攘。除了就餐,提供了类似于第三空间职能的Ricci还成了许多合作最初开始的地方,比如投资人来公司实地探访会选择在这里吃午饭,而如果你看到两个人在Ricci面对面正襟危坐,那么他们大概率是在面试,2023年以来,面试的主题几乎都是大模型。站长网2023-10-12 14:07:490000年轻人热捧的过年三件套有多火?
年轻人一边高喊着年味越来越淡,一边又用一个个过年三件套——美甲、美睫、美发,将新年仪式感拉满。大大小小的美甲美睫店,挤满了在过年前全副打扮的年轻人。2月3日,春节前最后一个周六,陈熙准备也跟风去做个美甲,但是一连问了三家美甲店,都被告知,预定顾客人数已满,没有位置可以预约。周日有位置,但那天是春节假期调休的工作日。站长网2024-02-09 13:48:460001Kimi悄悄更新智能体功能Kimi+ 增加小红书爆款生成等功能
昨晚,Kimi悄悄更新了自己的智能体功能Kimi。Kimi是一个增强版的智能体,它在原有的基础上增加了许多实用的功能,比如:什么值得买驱动的商品挑选,学术搜索,旅行规划师、小红书爆款生成器,论文写作助手,还有翻译、内容改写等常用功能。站长网2024-04-30 15:54:570001