Waymo推出多智能体运动预测方法MotionLM
站长网2023-10-10 17:20:070阅
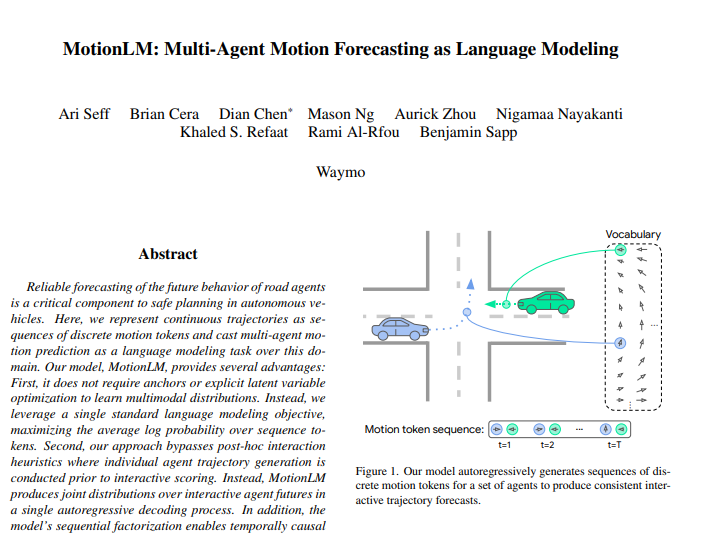
研究人员推出了一种名为MotionLM的新方法,用于预测道路上各种交通参与者的未来行为,这对于自动驾驶车辆的安全规划至关重要。MotionLM的主要思想是将多个道路参与者的行动预测任务视为一项语言建模工作,将预测任务视为创建语言短语的过程,其中语言是道路参与者的行动。
与现有方法不同,MotionLM不使用锚点或复杂的潜变量优化程序,而是采用简单的语言建模目标,以最大化正确预测未来动作令牌序列的平均对数概率。MotionLM的这种简单性使其更易于训练。
论文地址:https://arxiv.org/pdf/2309.16534.pdf
与许多当前方法不同,MotionLM使用单一的自回归解码方法来直接构建多个参与者未来行动的联合分布,这种交互建模集成更为高效和流畅。由于MotionLM的时序因子分解,还可以进行时间上因果条件的模拟。通过考虑事件之间的因果关系,可以更加真实和准确地预测未来的参与者行为。
在Waymo开放运动数据集的测试中,MotionLM表现出色,位居互动挑战榜首,表明它在复杂情况下预测道路参与者行为方面的性能优于其他方法。总之,MotionLM是自动驾驶车辆多代理动态预测的创新方法,对该领域的发展非常有益。
0000
评论列表
共(0)条相关推荐
NVIDIA狂飙AI ,市值暴涨,PC性能提升60倍!40系SUPER显卡发布,4899元碾压上代旗舰
【新智元导读】今年的CES大会上,NVIDIA依然给全世界震撼不停。正式下场AIPC,性能直接飙涨60倍;40系SUPER显卡,已全面碾压上代旗舰;AINPC甚至能跟屏幕外的玩家直接开启实时对话,这也太科幻了……一年一度的CES2024上,NVIDIA又给了全世界亿点点震撼。站长网2024-01-10 09:29:520000“99元做一次脸”的医美直播被紧急喊停!从业者们何去何从
医美直播被紧急按下刹车键。2月23日晚,央视《焦点访谈》曝光了医美直播乱象,指出大部分医美直播间开展的“带货”行为均涉嫌违法发布医疗广告。该节目一经播出,抖音、快手多个平台的医美直播间随即都被紧急关停,有医美达人感叹:“我仿佛见证了一个行业的覆灭。”目前抖音、快手平台已经不显示医美直播内容在此之前,内容平台曾对医美内容进行过多次治理。站长网2024-03-03 21:41:110000NVIDIA发布SteerLM:个性化定制大型语言模型响应的新AI方法
划重点:NVIDIA发布了一项名为SteerLM的新技术,旨在解决大型语言模型的问题,使用户能够自定义模型的响应。SteerLM通过四个步骤的监督微调过程,允许用户定义关键属性,如帮助性、幽默和创造力,来引导模型的行为。站长网2023-10-17 11:17:330000京东APP上线AI智能导购助手「京东京言」 提供购物相关建议
近日,京东APP上线了AI智能导购助手「京东京言」,用户在京东APP搜索「京东京言」即可进入相关页面。点击前往京东京言体验入口京东京言能提供以下服务:(1)专业品类咨询:想了解专业品类知识,更好地了解不熟悉的商品,可以这样咨询:智能马桶怎么挑、乳胶床垫怎么选、智能门锁选哪种。站长网2023-11-15 18:06:430001极氪001宣布限时降价3万-3.7万元 优惠后26.9万元起
极氪汽车宣布其001车型降价3万-3.7万元,起售价降至26.9万元,并且部分车型还附赠7kW智能家充服务套餐。具体降价情况如下:-YOU版100kWh电池:限时购买价34.9万元起,立减3.7万元。-ME版100kWh电池:限时购买价31.9万元起,立减3.0万元。-WE版86kWh/100kWh电池:限时购买价26.9万元起,立减3.1万元。站长网2023-08-11 09:36:110000