机器人研究迎来ImageNet时刻:一个数据集,让DeepMind具身智能大模型突飞猛进
为什么机器人技术远远落后于 NLP、视觉和其他 AI 领域?除其他困难外,数据短缺是罪魁祸首。谷歌 DeepMind 联合其他机构推出了 Open X-Embodiment 数据集,并训练出了能力更强的 RT-X 模型。
在大模型不断取得突破的2023,把大模型当做大脑来辅助运行的具身智能机器人研究也在被迅速推进。
2个多月前,谷歌 DeepMind 推出了第一个控制机器人的视觉 - 语言 - 动作(VLA)模型 ——RT-2。这个模型让机器人不仅能解读人类的复杂指令,还能看懂眼前的物体(即使这个物体之前从未见过),并按照指令采取动作。比如,你让机器人拿起桌上「已灭绝的动物」。它会抓起眼前的恐龙玩偶。

当时,一位谷歌高管称,RT-2是机器人制造和编程方式的重大飞跃。「由于这一变化,我们不得不重新考虑我们的整个研究规划了。」
更令人吃惊的是,时间仅仅过去了两个多月,DeepMind 的这个机器人模型又进步了,而且一下就提高了两倍。
这是怎么实现的呢?
我们知道,机器人通常在做某一件事情上非常专业,但通用能力很差。一般情况下,你必须针对每项任务、每个机器人和环境训练一个模型。改变一个变量往往需要从头开始。但是,如果我们能将各种机器人学的知识结合起来,创造出一种训练通用机器人的方法呢?
这就是 DeepMind 在过去一段时间所做的事情。他们汇集了来自22种不同机器人类型的数据,以创建 Open X-Embodiment 数据集,然后在之前的模型(RT-1和 RT-2)的基础上,训练出了能力更强的 RT-X(分别为 RT-1-X 和 RT-2-X)。
他们在五个不同的研究实验室测试了 RT-1-X 模型,结果显示,与针对每个机器人独立开发的方法相比,新方法在五种不同的常用机器人中平均成功率提高了50%。他们还表明,在上述数据集上训练的 RT-2-X 在现实世界机器人技能上的表现提高了2倍,而且,通过学习新数据,RT-2-X 掌握了很多新技能。这项工作表明,在来自多个机器人类型数据上训练的单个模型比在来自单个机器人类型数据上训练的模型在多个机器人上的性能要好得多。

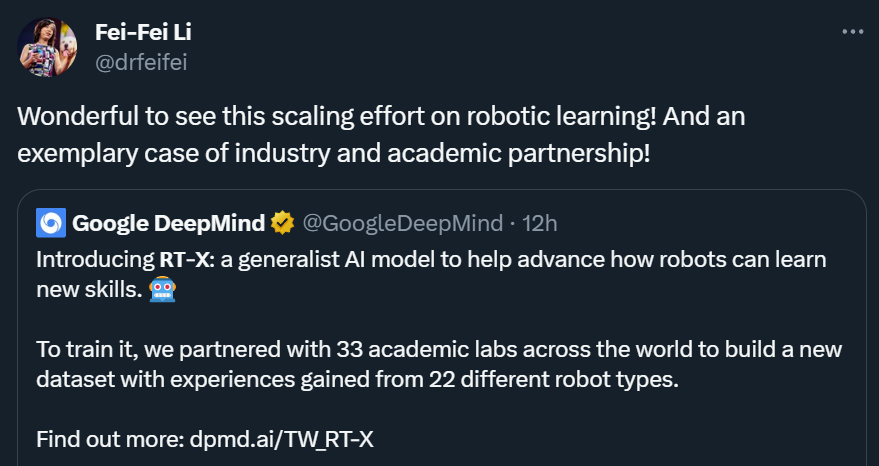
值得一提的是,这项研究并非由 DeepMind 独立完成,而是他们与33家学术实验室通力合作的结果。他们致力于以开放和负责任的方式开发这项技术。

目前,Open X-Embodiment 数据集和 RT-1-X 模型检查点已经对广泛的研究社区开放。
英伟达高级人工智能科学家Jim Fan表示今天可能是机器人的ImageNet时刻。
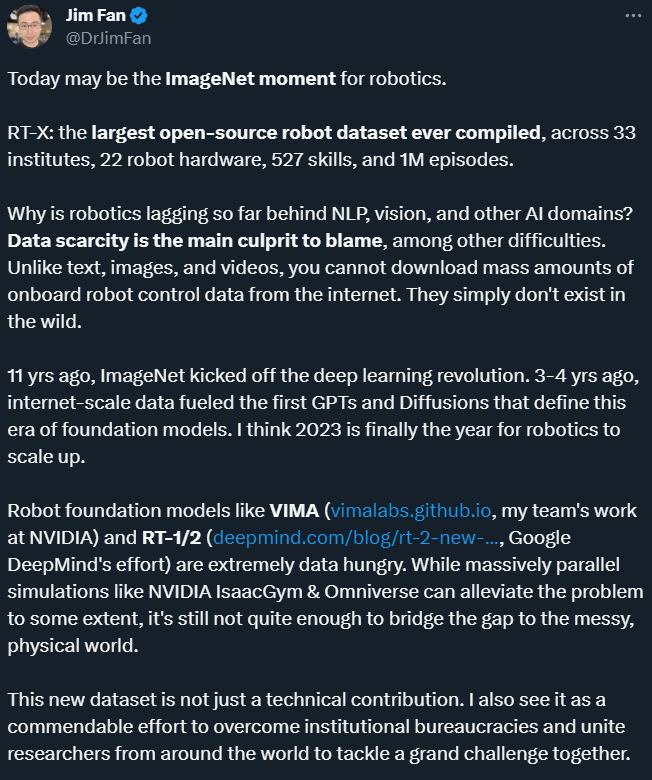
谷歌研究员Karol Hausman也表达了同样的感叹:机器人的ImageNet时刻终于到来了。

Open X-Embodiment 数据集,机器人的 ImageNet 时刻
数据集以及基于数据集训练的模型在推进 AI 进步方面发挥了关键作用。正如 ImageNet 推动了计算机视觉的研究,Open X-Embodiment 同样推动了机器人技术的发展。
一直以来,构建多样化数据集是训练通用模型的关键,这些训练好的模型可以控制许多不同类型的机器人,遵循不同的指令,对复杂任务进行基本推理,并有效地进行泛化。然而,对于任何单个实验室来说,收集这样的数据集都过于耗费资源。
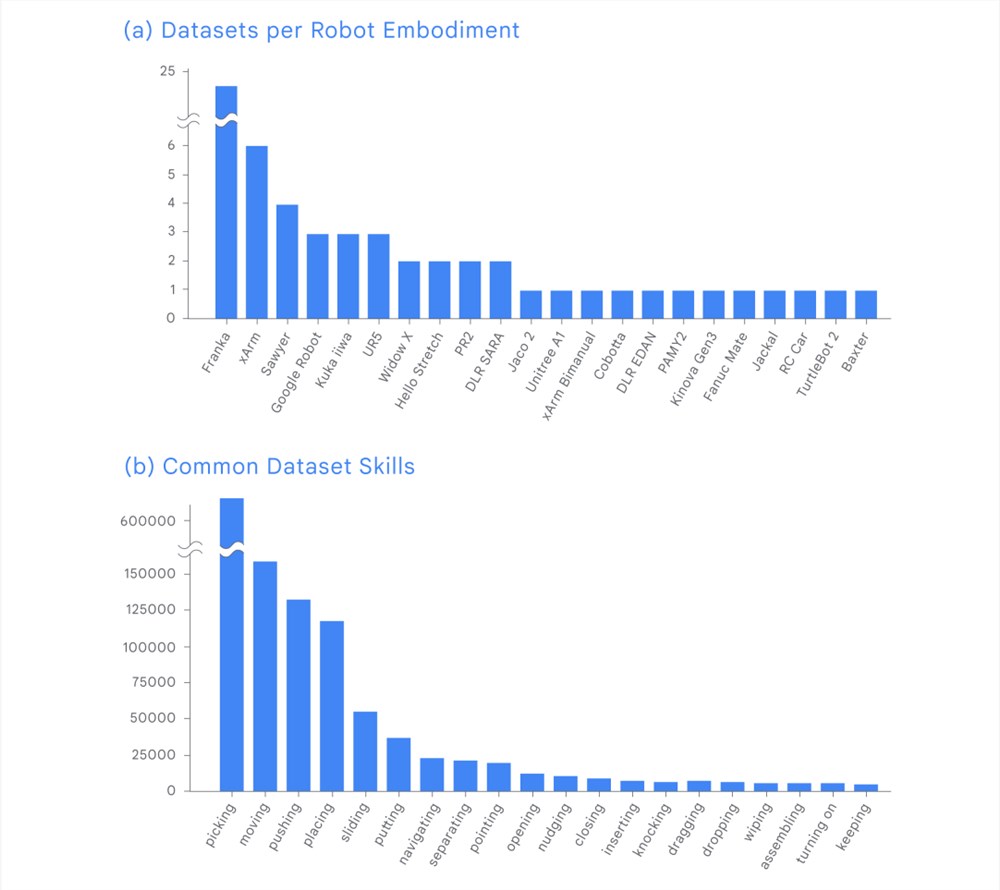
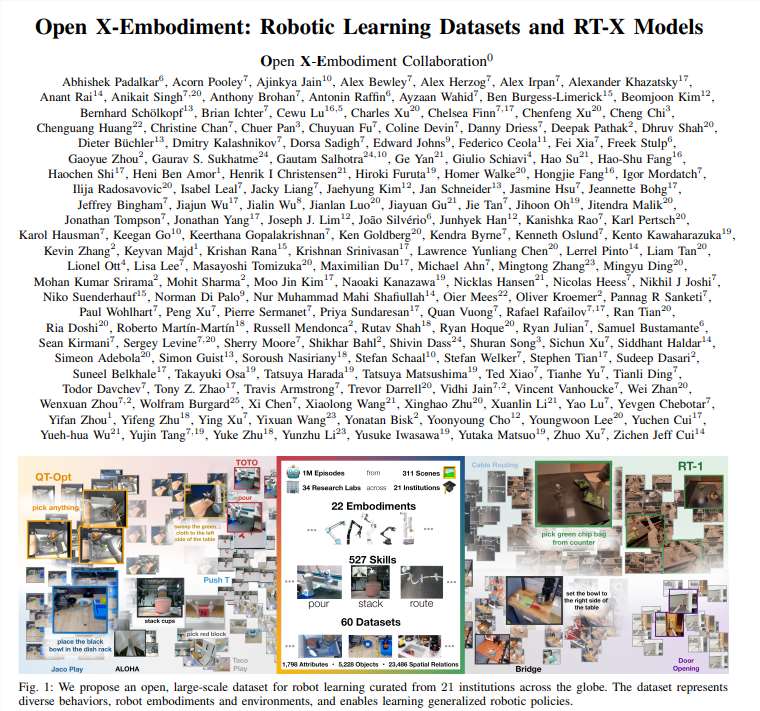
为此,DeepMind 与33家机构的学术研究实验室展开合作,从而构建了 Open X-Embodiment 数据集。他们从22个机器人实例中收集数据,这些数据涵盖超过100万个片段,展示了机器人500多项技能和在150000项任务上的表现。该数据集是同类中最全面的机器人数据集。

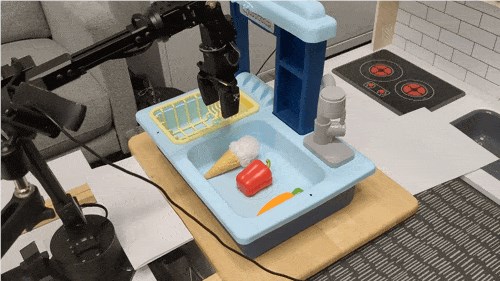
来自 Open X-Embodiment 数据集的样本,包括500多种技能和150000个任务。
Open X-Embodiment 基本信息
RT-1-X:成功率提升50%
RT-X 基于两个 robotics transformer(RT)模型构建而成。
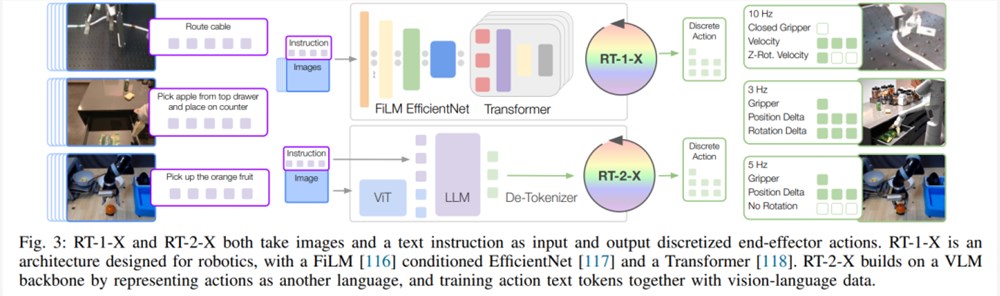
具体而言,他们使用 RT-1训练 RT-1-X,其中 RT-1是建立在 Transformer 架构上的35M 参数网络,专为机器人控制而设计,如图3所示。
此外,他们还在 RT-2上训练 RT-2-X,其中 RT-2是一系列大型视觉语言动作模型 (VLA),在互联网规模的视觉和语言数据以及机器人控制数据上训练而成。
为了评估 RT-1-X,DeepMind 将其与在特定任务上(例如开门)开发的模型进行了比较。结果显示,使用 Open X-Embodiment 数据集训练的 RT-1-X 平均性能优于原始模型50%。
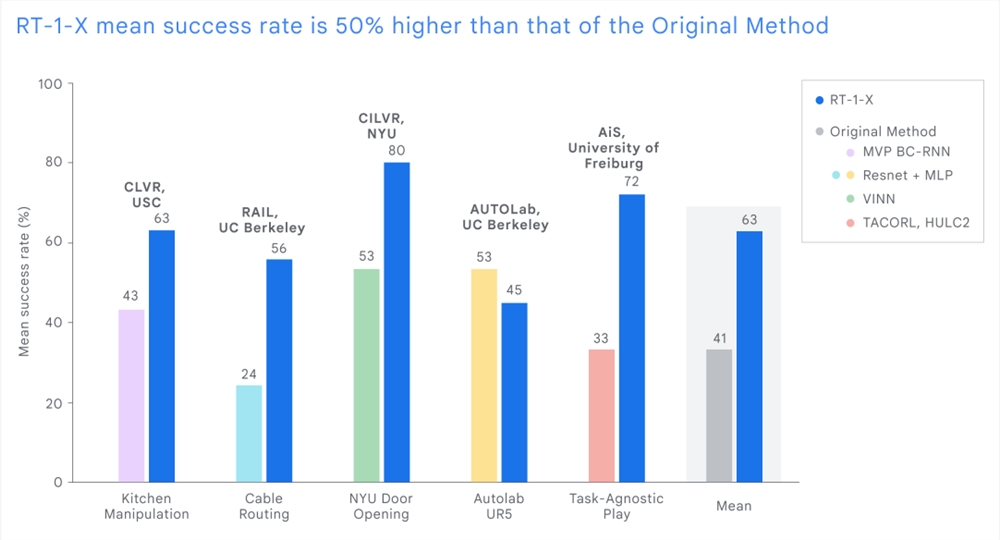
RT-1-X 平均成功率比原始方法提高50%。
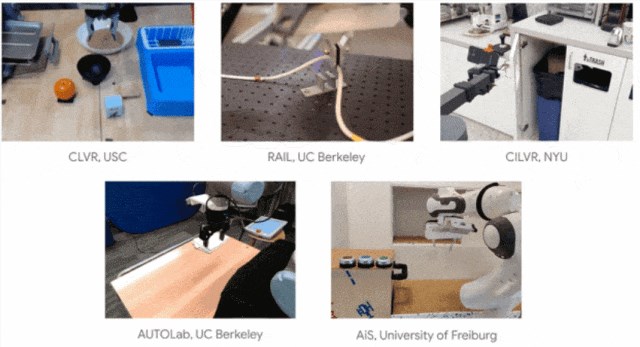
来自不同合作机构的关于 RT-1-X 的效果展示
RT-2-X:无障碍解锁新技能
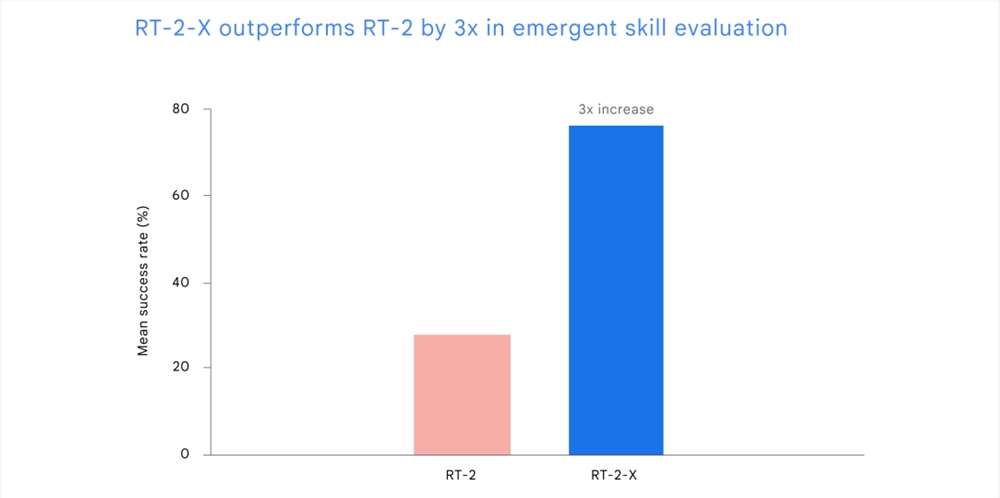
为了研究 RT-X 的知识迁移能力,DeepMind 又进行了其他实验。这些实验涉及 RT-2数据集中不存在的对象和技能,但这些对象和技能存在于另一个机器人的数据集中。结果表明,在掌握新技能方面,RT-2-X 的成功率是其之前的最佳模型 RT-2的三倍。这也说明了,与其他平台的数据进行联合训练可以为 RT-2-X 赋予原始数据集中不存在的额外技能,使其能够执行新颖的任务。
上图展示了 RT-2-X 对物体之间空间关系的理解。
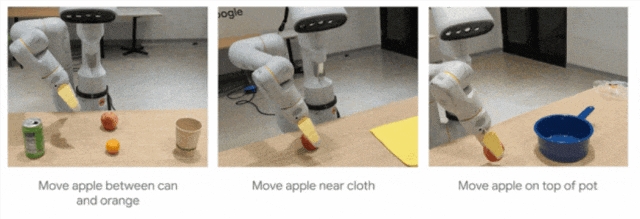
一系列结果表明,RT-2-X 实现了 RT-2以前无法实现的技能,包括对空间更好的理解。例如,如果我们要求机器人「将苹果移动到布料附近」、又或者要求机器人「将苹果移动到布料上」,为了实现目标要求,机器人会采取完全不同的轨迹。只需将介词从「near」更改为「on」,就可以调整机器人采取的动作。
RT-2-X 表明,将其他机器人的数据结合到 RT-2-X 训练中可以改善机器人的任务执行范围,但前提是使用足够高容量的架构。
RT-2-X (55B): 迄今为止在学术实验室执行未知任务的最大模型之一
研究启发:机器人需要相互学习,研究人员也一样
机器人研究正处于令人兴奋的早期阶段。DeepMind 的这项新研究表明,通过利用更多样化的数据和更好的模型进行扩展学习,有可能开发出更有用的辅助机器人。与世界各地的实验室合作并共享资源,对于以开放和负责任的方式推进机器人研究至关重要。DeepMind 希望通过开放数据源和提供安全但有限的模型来减少障碍,加快研究。机器人技术的未来有赖于机器人之间的相互学习,最重要的是,让研究人员能够相互学习。
这项工作证明,模型可以在不同环境下通用,无论是在谷歌 DeepMind 的机器人上,还是在世界各地不同大学的机器人上,其性能都得到了显著提高。未来的研究可以探索如何将这些进步与 RoboCat 的自我完善特性相结合,使模型能够根据自身经验不断改进。未来的另一个方向是进一步探索不同数据集的混合会如何影响跨具身智能体泛化,以及这种泛化是如何是实现的。
如果你想了解有关 RT-X 的更多信息,可以参考 DeepMind 发布的这篇论文:
论文链接:https://robotics-transformer-x.github.io/paper.pdf
项目链接:https://robotics-transformer-x.github.io/
参考链接:https://www.deepmind.com/blog/scaling-up-learning-across-many-different-robot-types
苹果 15 英寸 MacBook Air 面板生产中 或于 WWDC23 正式发布
受人尊敬的显示器分析师RossYoung今天在与用户分享的一条推文中说,大屏幕的15英寸MacBookAir的面板生产在2月开始,3月增加产量,4月计划再次增加。随着生产的进行,Young表示他不知道其「精确的推出时间」,但它有可能在「4月底/5月初」推出。站长网2023-04-12 12:59:590000三只羊被立案调查:直播带货月饼翻车 涉嫌误导消费者
合肥高新区市场监督管理局近日发布通报,对三只羊网络科技有限公司在直播带货中销售的“香港美诚月饼”涉嫌误导消费者的行为展开立案调查。该公司在直播中推广的月饼产品引起了公众关注。据媒体报道,三只羊网络科技有限公司及其签约主播在直播过程中销售了一款标称为香港美诚品牌的月饼,提供了99元3盒、169元3盒等多种价格选择。但随后,众多香港消费者表示对该品牌并不熟悉。0000普通玩家对于AIGC的侧重点:结构化数据!
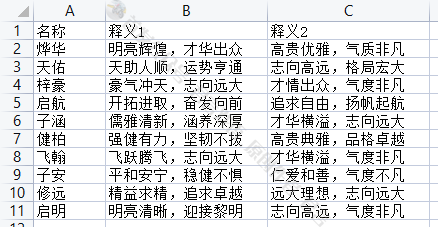
对ChatGPT提出一个需求:问题:请推荐10个中文男孩名称,不包含姓氏,名字是两个字的,每一个名字都有相应的释义,释义分为两句,类似诗句,请以表格形式返回给我,第1列是名称,释义分别放在第2列和第3列。ChatGPT回答:好的,以下是10个中文男孩名称及其相应释义,按照你要求的表格形式排列:站长网2023-05-05 17:47:030002余承东官宣享界S9开启先行尊享计划:入围可优先交付并获高级赠品
快科技7月26日消息,华为车BU董事长官宣享界S9开启先行尊享计划,将面向早期预订的用户,限额5000名优先交付,成功入围即可享受优先交付等先行尊享权益。活动规则如下:1、按照活动配置预订或改配并在正式上市发布后48小时内确认订单,即被视为成功参与;2、会按照预订的顺序,分批次向成功参与的用户发送入围通知,直至名额用完为止;3、已入围用户需在确认订单后五天内确认交付方案,否则视为放弃名额;站长网2024-07-26 17:58:0900003个月涨粉1000万,抖音今年最大的黑马出现了?
千万粉丝网红@李炮儿的《中国好声音》挑战之旅,最终折戟于“三十强冲刺赛”。在此之前,@李炮儿现场“拜师”导师柯以敏的新闻爆出后,引发过网友们的一阵讨论,虽然不少人对此持“嘲讽”态度,但这次“好声音之行”对当事人李炮儿的助力却是巨大的。站长网2023-08-02 17:30:520000