特斯拉机器人进厂打工,马斯克:手的自由度今年将达到22个!
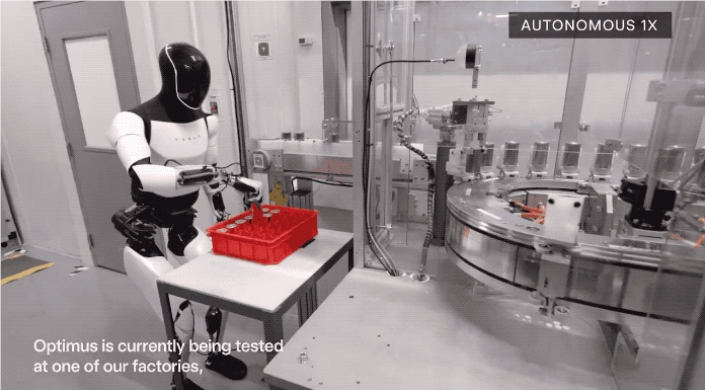
特斯拉机器人Optimus最新视频出炉,已经可以在厂子里打工了。
正常速度下,它分拣电池(特斯拉的4680电池)是这样的:

官方还放出了20倍速下的样子——在小小的“工位”上,拣啊拣啊拣:
这次放出的视频亮点之一在于Optimus在厂子里完成这项工作,是完全自主的,全程没有人为的干预。
并且在Optimus的视角之下,它还可以把放歪了的电池重新捡起来放置,主打一个自动纠错:

对于Optimus的手,英伟达科学家Jim Fan给出了高度的评价:
Optimus的手是全球五指机器人里最灵巧的之一。
它的手不仅有触觉感应,自由度(DoF)也达到了11个,而同行基本上都只有5-6个自由度。
并且坚固耐用,无需经常维护即可承受大量物体交互。
而就在Jim Fan的评论区,马斯克还现身透露了一个更重磅的消息:
今年晚些时候,Optimus手的自由度将达到22个!

不过有一说一,视频中展示Optimus分拣自家电池还只是“开胃菜”。
这一次,特斯拉罕见地公布了机器人的训练详情。
和特斯拉汽车相似的逻辑
首先在神经网络方面,从视频中的字幕中可以得知,特斯拉给Optimus部署的是一个端到端的神经网络来训练分拣电池的任务。
也正因如此,Optimus所用到的数据仅仅是来自于2D摄像头和手部的触觉、力度传感器,并直接生成关节控制序列。
特斯拉工程师Milan Kovac进一步透露,这个神经网络完全是在机器人的嵌入式FSD计算机上运行,并且由机载电池供电:
当我们在训练过程中添加更多不同的数据时,单个神经网络可以执行多个任务。
在训练数据方面,我们可以看到是人类戴着VR眼镜和手套,通过远程操作的方式来采集:
对于这一点,Jim Fan认为:
将软件设置为第一人称视频流输入和精确控制流输出,同时保持极低的延迟是非常重要的。
这是因为人类对自己的动作和机器人的动作之间哪怕是最小的延迟都非常敏感。
而Optimus恰好有一个流体全身控制器,可以实时执行人体姿势。
并且特斯拉机器人已经将这种模式扩展到了其它任务中:
如此规模也是令Jim Fan大受震惊的一点:
并行收集数据,一个机器人是远远不够的,而且人类还得每天轮班倒。
这种规模的操作可能是学术实验室里想都不敢想的。
不仅如此,从视频中Optimus们正在执行的任务来看也是多种多样,有分拣电池的,有叠衣服的,还有整理物品的。
Milan Kovac表示特斯拉在其中一家工厂已经部署了几个机器人,它们每天正在真实的工作站接受测试并不断改进。
总而言之,Optimus单是从视觉和人类示范来进行训练来看,这一点上是和特斯拉汽车的逻辑是有点类似了。
在视频的最后,官方还曝出Optimus另一个能力上的提升——可以走更远的路了:

One More Thing
Jim Fan的实验室也在这两天放出了一个新进展——
让机器狗踩着瑜伽球行走!

而它的训练方法和特斯拉Optimus截然不同,是完全在模拟环境中进行,然后零样本迁移到真实世界中,无需微调,直接运行。
具体背后的技术则是团队新推出的DrEureka,它是以之前五指机器人转笔背后的技术Eureka为基础。
DrEureka是一个LLM智能体,可以编写代码来训练机器人在模拟中的技能,并编写更多的代码来弥合困难的模拟与现实之间的差距。
简而言之,它完全自动化了从新技能学习到现实世界部署的流程。
而相较于特斯拉Optimus和英伟达机器狗的训练方式,Jim Fan也做了个灵魂总结:
远程操作是解决类人机器人问题的必要但不充分的条件。从根本上说,它无法扩展。
并且也有网友对此表示认同:
那么你觉得呢?
参考链接:
[1]https://twitter.com/Tesla_Optimus/status/1787027808436330505
[2]https://twitter.com/DrJimFan/status/1787154880110694614
[3]https://twitter.com/DrJimFan/status/1786429467537088741
[4]https://twitter.com/_milankovac_/status/1787028644399132777
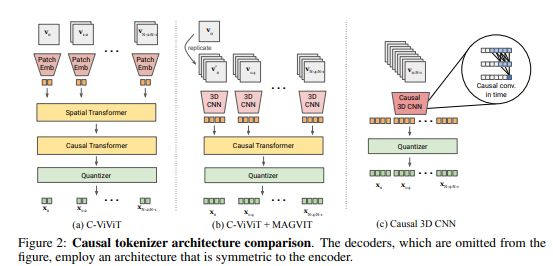
谷歌、CMU研究表明:语言模型通过使用良好的视觉tokenizer首次击败了扩散模型
要点:1.研究表明,在图像和视频生成领域,语言模型通过使用良好的视觉tokenizer首次击败了扩散模型,强调了tokenizer的重要性。2.传统大型语言模型(LLM)在图像生成方面一直落后于扩散模型,主要原因是缺乏有效的视觉表示。站长网2023-10-11 17:56:520000华为畅享60 Pro将于5月18日发布
华为宣布,将在5月18日举行夏季全场景新品发布会,并发布畅享60Pro。据悉该手机采用了直屏设计,后置摄像头采用了“双环”设计,正面则配备了一块中置挖孔屏。此外,华为还将在发布会上一同发布全新华为WATCH4、华为MatePad、华为MateBook等系列。站长网2023-05-15 15:14:030000老匡:2025视频号9大机会点!每一个都会在明年实现!
看“趋势”和“机会点”这个东西,你不要过分迷信数据,你出去做调研,用户永远告诉你“他们需要既便宜又好的产品”,所以数据只能告诉你正确的废话,意义不大。正确的做法是大量调研,得出感性谈判,再去用数据求证真伪,最后得出结论。真正的需求,往往是感性判断,而非理性得出,例如苹果手机,在没这个玩意儿之前,靠调研和数据,你永远不知道大家对手机的需求是怎样的。0000Rabbit R1翻车,AI手机或许才是更好的解决方案
不久前在CES2024上亮相的智能终端RabbitR1,由于首批1万台很快售罄、两周超过5万台的市场表现,曾引发了外界的众多关注。但就在日前,有提前试用了RabbitR1的用户吐槽了这款产品实际表现,认为其响应时间过慢,或并不适合AI设备的未来趋势,甚至有观点认为其完全可以被一个App所替代。站长网2024-01-30 09:09:360000中国互联网协会重申:我国人工智能已进入全球第一梯队
AI人工智能正在被越来越多的国家重视和发展,这也被寄希望是新一轮的科技革命。中国互联网协会副理事长黄澄清在GPT产业联盟成立大会上”表示,近年来我国人工智能产业在技术创新,产业生态融合应用等方面也取得了积极的进展,已经进入了全球第一梯队。黄澄清指出,随着人工智能技术的普及和应用,我们需要思考如何保护个人隐私和数据安全,以及如何应对人工智能技术可能带来的就业变革和社会影响的问题。0001