李飞飞团队推手部动捕系统DexCap 泡茶剪纸轻松完成
要点:
李飞飞团队开发了成本仅3600美元的便携式手部动捕系统DexCap,能让机器人完成各种花样任务。
DexCap系统利用SLAM、电磁场和3D观察实时追踪手部运动,配合新算法DEXIL,实现了精确的手部动作模拟。
DexIL框架通过人手动作捕捉数据训练机器人,克服了手部尺寸差异和视觉差距等挑战,使机器人能够学习复杂的操作技能。
李飞飞团队最新开发的DexCap系统彰显了人工智能领域的巨大进步。这一便携式手部动捕系统不仅成本低廉,仅需3600美元,而且能够让机器人完成各种复杂任务。通过结合SLAM、电磁场和3D观察等技术,DexCap实现了对手部运动的实时追踪,同时采用了全新的模仿算法DEXIL,能够精确模拟手部动作。这一技术突破使得机器人能够更好地学习人类操作技能,实现了人机交互的深度融合。
论文地址:https://arxiv.org/pdf/2403.07788.pdf
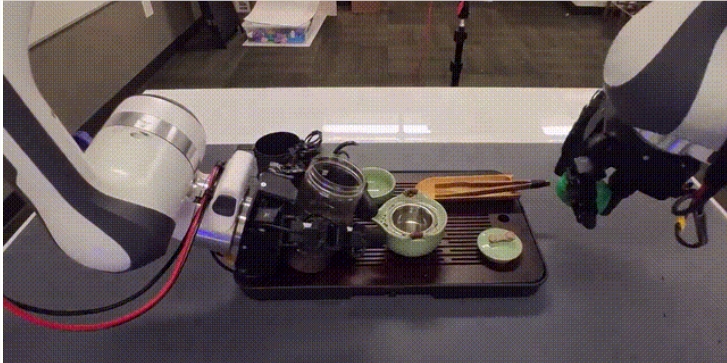
DexCap系统的核心设计在于其前向后向设备的组合,其中包括正面胸部相机架和背面背包中的迷你PC。通过这些设备,系统能够实时捕捉用户的手部运动,并进行精确的模拟。而DexIL框架则进一步提升了系统的学习能力,通过重新定位数据和使用点云观测,克服了手部尺寸差异和视觉差距等挑战,实现了从人类手部动作数据中训练机器人的目标。
除了技术方面的突破,DexCap系统还提供了便捷的人在回路纠正功能,使用户能够根据需要灵活调整机器人的动作。通过残差纠正模式和遥控操作模式,用户可以实现精细控制或全面控制机器人的动作,从而更好地适应不同的任务需求。这一功能的引入进一步提升了系统的实用性和灵活性,使其能够广泛应用于各种场景中。
总的来说,DexCap系统的问世标志着人工智能领域在机器人技术方面的重大突破。它不仅提供了成本低廉的解决方案,还实现了对复杂任务的高效执行,为个人机器人和个人AI的发展开辟了新的可能性。随着这一技术的不断完善和推广,相信将会为人类生活带来更多便利和惊喜。
单月涨粉466万,“撒币玩家”在抖音风生水起
抖音11月涨粉榜已出,我们先一起看榜:10月,我们见证了剧情达人@大圆哥以787.9W的绝对优势位居涨粉榜榜首,为“沉寂已久”的内容生态注入了一丝活力。而时间来到11月,像@大圆哥这样的超级黑马并未出现,登上榜首的@户外发(东方阿保)增粉量为466.3W,与@大圆哥有着300W的涨粉差距。站长网2023-12-15 13:58:090000原钉钉副总裁成立Al应用开发平台BetterYeah AI 已获亿元融资
据36氪消息,斑头雁智能科技是一家人工智能公司,由原钉钉副总裁张毅(花名陶钧)创立。该公司最近完成了近千万美元的A轮融资,用于开发企业级AIAgent产品BetterYeahAI。斑头雁智能科技已经完成了2轮融资,累计融资额达到1亿元人民币。图源备注:图片由AI生成,图片授权服务商Midjourney0002Glaze 1.0发布,可以帮助艺术家防止作品风格被AI抄袭
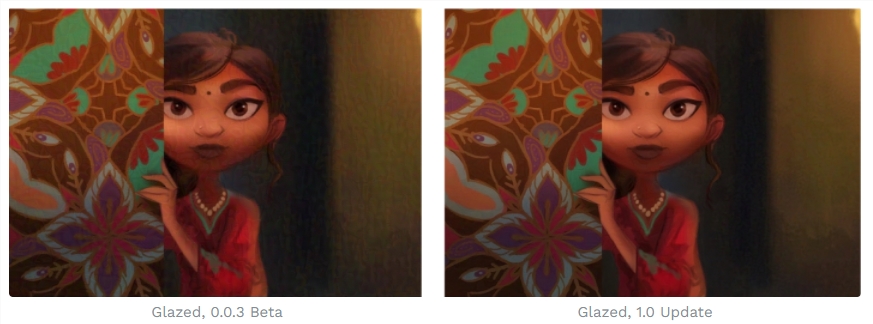
我们知道,包括StableDiffusion、MidJourney等图像生成工具可以通过在互联网上收集艺术家的图像,并将其用作训练数据。之后,用户可以输入指令,要求按照原始艺术家的"风格"绘制一幅画或插图。站长网2023-06-29 15:45:590001郭明錤:苹果 MR 头戴设备成功关键因素在于能否与 AI、AIGC 高度整合 投资人更关注何时推出类 ChatGPT 服务
苹果WWDC23全球开发者大会将于6日正式登场,苹果首款混合现实(MR)头戴设备将亮相,知名分析师郭明錤表示,投资人对于WWDC关注重点在于苹果何时推出类似生成式ChatGPT服务,高于首款MR设备,长期来看,苹果头戴设备的成功关键因素在于能否与AI、AIGC高度整合。站长网2023-06-05 21:29:360000戴尔发布生成式AI工具 提供预训练模型
划重点:戴尔发布生成式AI工具,名为DellValidatedDesignforGenerativeAIwithNVIDIAforModelCustomization,可从数据中提取智能,避免从头构建模型。该工具提供了预训练模型,帮助用户根据需要定制和微调生成式AI模型,同时确保信息安全。站长网2023-10-16 23:51:150000