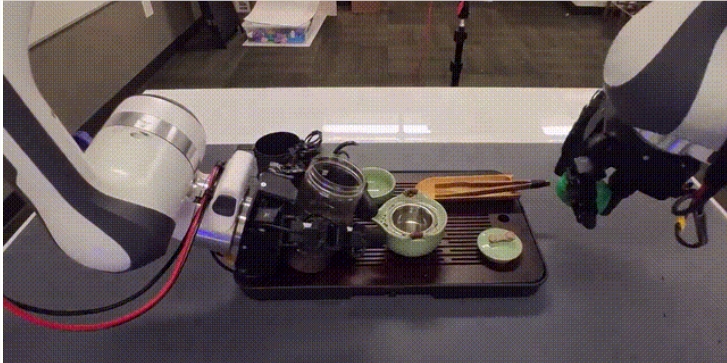
李飞飞团队推手部动捕系统DexCap
李飞飞团队推手部动捕系统DexCap 泡茶剪纸轻松完成
要点:李飞飞团队开发了成本仅3600美元的便携式手部动捕系统DexCap,能让机器人完成各种花样任务。DexCap系统利用SLAM、电磁场和3D观察实时追踪手部运动,配合新算法DEXIL,实现了精确的手部动作模拟。DexIL框架通过人手动作捕捉数据训练机器人,克服了手部尺寸差异和视觉差距等挑战,使机器人能够学习复杂的操作技能。站长网2024-03-15 18:03:300000

热点
关注
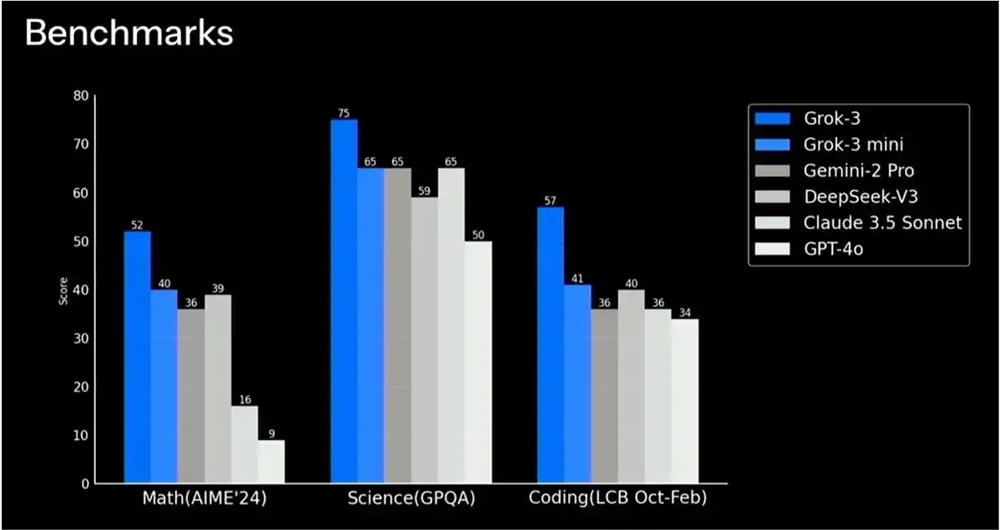
马斯克旗下xAI发布Grok3模型 包含mini、Reasoning等版本
2025-02-18 14:10:29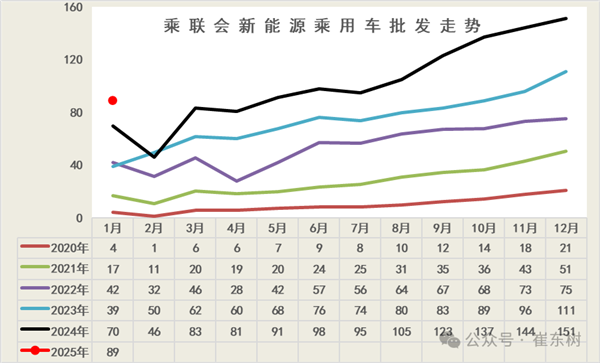
新能源汽车开门红:1月销量、渗透率创同期历史新高
2025-02-16 10:48:12新势力周销量榜更新:小鹏重回第一、小米排在第三
2025-02-18 14:08:26
春晚才过两周机器人就进化成这了:算法完成升级 能应对任意舞蹈挑战
2025-02-16 10:41:23接不接DeepSeek?互联网大厂的新天问
2025-02-18 14:03:17
腾讯回应微信接入DeepSeek:灰度测试 免费使用R1满血模型
2025-02-16 10:38:00换个名字获客成本降到不足1美金,“大神”又推火了一个AI App?
2025-02-18 09:52:20
百度、OpenAI等大模型免费用 专家:DeepSeek迫使头部玩家打破封闭生态
2025-02-16 10:31:38马化腾再次短暂登顶中国富豪榜 腾讯AI、游戏领域表现亮眼
2025-02-18 09:44:50Meta 正在大力投资 AI 驱动的类人机器人:希望成为机器人的 Android
2025-02-16 10:22:14
