新AI框架H2O:将人类动作实时转换为机器人动作 可行走、后空翻、踢球等
划重点:
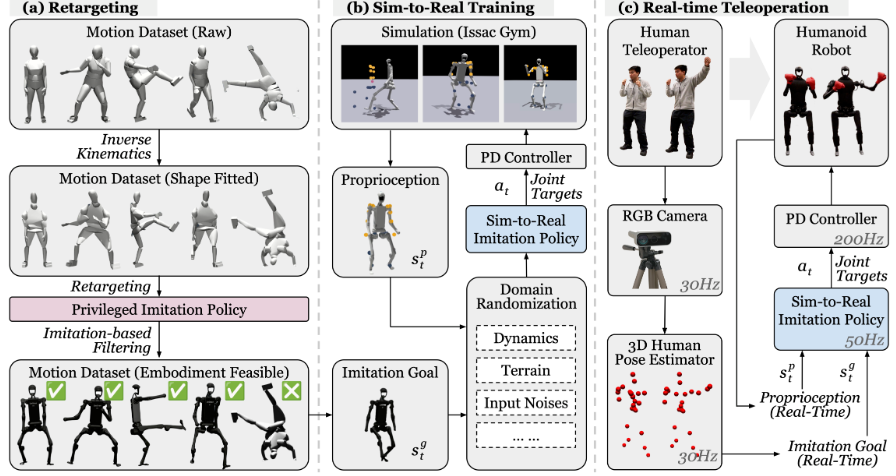
1. 🔄 **框架介绍**:H2O(Human to Humanoid)是基于强化学习的框架,通过仅使用RGB摄像头实现了全尺寸人形机器人的实时全身遥控操作。
2. 🔄 **数据处理过程**:采用可扩展的“从模拟到实际”处理,通过特权模仿者筛选和选择可行的动作,构建了大规模的重定目标运动数据集。
3. 🔄 **实时遥操作实现**:在模拟环境中使用经过精炼的动作训练了鲁棒的全身机器人模仿者,并以零次试验方式将其转移到实际机器人,成功实现了在真实场景中的动态全身运动遥操作。
在最新的研究中,由卡内基梅隆大学的研究团队开发,提出了一种名为H2O(Human to Humanoid)的框架,通过强化学习实现了人对人形机器人的实时全身遥控操作。
该框架在仅使用RGB摄像头的条件下,成功地让人形机器人模仿并实时执行各种动态的全身运动,包括行走、后空翻、踢球、转身、挥手、推动、拳击等。

为了实现这一突破性的技术,研究团队提出了一种可扩展的“从模拟到实际”的处理过程,以构建大规模的人类运动数据集,为人形机器人提供实时遥操作的训练样本。在处理过程中,通过特权模仿者筛选和选择可行的动作,优化了人形机器人的身体模型,确保其对人类运动的高度还原性。

框架的核心包括三个关键阶段:首先,通过优化形状和运动参数,将SMPL(Skinned Multi-Person Linear model)身体模型与人形机器人的结构对齐,形成基础的运动数据集。其次,通过训练一个特权模仿策略,去除运动数据集中的异常和不可行的动作,生成更加真实和清晰的运动数据集。最后,通过在模拟环境中训练一个实时模仿策略,实现对人形机器人的零次试验遥操作。
实时遥操作的过程涉及使用RGB摄像头和姿势估计器捕捉人类运动,然后通过训练有素的模仿策略,使人形机器人能够即时模仿并执行这些运动。
这项研究不仅成功实现了全身运动的学习式实时遥操作,还展示了在真实世界情境中的应用,如左右踢球、递盒子、前行后跳、拳击等。据了解,这是首次在人形机器人领域实现了这一技术上的突破,为全新的人机交互和协作场景提供了有力的支持。
项目入口:https://top.aibase.com/tool/human-to-humanoid-h2o-
微信公众平台调整模板消息内容 去除自定义颜色、表情符号
近日,微信公众平台运营中心发布《关于规范公众号模板消息的再次公告》,宣布对模板消息内容规范措施进行调整。据了解,2023年5月4日起,微信公众平台将对模板消息以下内容进行调整:1)去除自定义颜色、表情符号;(表情符号由替换为“□”改为直接去除)2)去除尾部/备注内容;3)去除首行内容;单个中间主内容不超过20字,且不支持换行。站长网2023-05-06 16:09:510000快递员称30分钟送完的货现在干12小时
划重点:⭐快递员反映新规实施后工作压力增大,一天工作时间长达12小时,收入增加仅60元。⭐新规要求快递员电话确认配送,引发争议,且未明确对快递员责任认定。⭐部分快递员因新规感到无法承受而提出离职,网友呼吁放置驿站提高便利性。站长网2024-03-03 19:13:590000微软支持的科技组织 BSA 倡导制定人工智能使用规则
BSA是得到微软等公司支持的科技倡导组织,周一发布的一份文件表示,他们正在倡导制定人工智能方面的规则,以纳入美国隐私立法。站长网2023-04-25 11:51:480000马斯克xAI完成60亿美元B轮融资 将发布多个技术更新和产品
站长网2024-05-27 16:34:340000知识付费是复利,但不应该是暴利!
各位村民好,我是村长。知识付费在这几年,很火热。有巨头,也有小兵,当然更多的还是割韭菜。割那些特别想赚钱,但本质上又赚不到钱人的韭菜。最近和不少人博主、圈主在交流,简单选取一些思考和大家一起来分享。01知识付费是低成本的投入首先毫无疑问,做知识付费算是各种变现场景中,投入成本相对较少的,尤其是现金成本。做知识付费核心的投入在体力、知识和时间。0000