研究人员推新AI框架CyberDemo:通过视觉观察让机器人模仿学习
划重点:
- 🤖 CyberDemo 是一个新颖的框架,利用模拟人类示范来进行现实世界的机器人操纵任务。
- 📊 与传统方法相比,CyberDemo 在各种操作任务中表现出更高的成功率,尤其在处理未见过的物体时表现突出。
- 🌐 CyberDemo 的方法挑战了人们对解决实际问题必须依赖真实示范数据的信念,展示了模拟数据的潜力。
加利福尼亚大学圣地亚哥分校(UCSD)和南加利福尼亚大学(USC)的研究人员最近推出了一种名为 CyberDemo 的新型人工智能框架,旨在通过视觉观察进行机器人模仿学习。
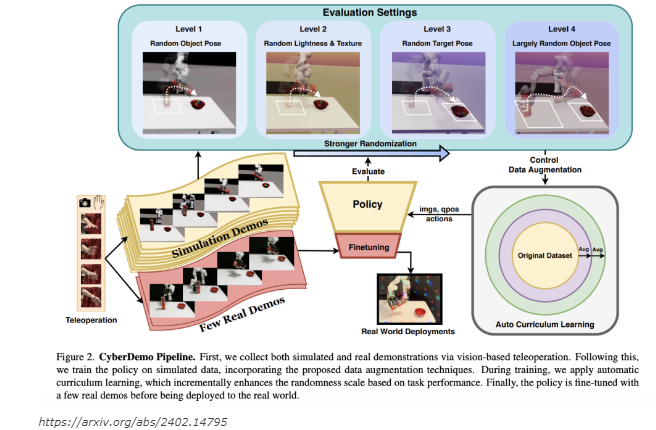
传统的模仿学习方法通常需要大量高质量的示范数据来教导机器人完成复杂任务,特别是对于需要高度灵巧的任务来说。然而,CyberDemo 通过利用模拟人类示范来完成真实世界的机器人操纵任务,从而减少了对物理硬件的需求,使得远程和并行数据收集成为可能。此外,通过模拟器专属的数据增强技术,CyberDemo 显著增强了任务性能,生成的数据集比在真实世界环境中收集的数据集大得多。
CyberDemo 的方法从在模拟环境中使用低成本设备进行远程操作收集人类示范开始。随后,通过广泛的增强方法对数据进行丰富处理,包括各种视觉和物理条件,以提高训练策略对真实世界变化的鲁棒性。该框架采用课程学习策略进行策略训练,首先使用增强数据集,然后逐渐引入真实世界示范以对策略进行微调。与使用真实世界示范数据微调的预训练策略相比,这种方法确保了平稳的从模拟到现实的过渡,解决了光照、物体几何和初始姿势变化等问题,而无需额外的示范。

在各种操纵任务中,CyberDemo 的性能令人印象深刻。相比传统方法,CyberDemo 在任务成功率上取得了显著提高。尤其值得注意的是,在涉及未见过的物体时,CyberDemo 的泛化能力特别突出,在旋转新物体的成功率达到42.5%,这是传统方法表现的显著飞跃。对比基线包括先进的视觉预训练模型如 PVR、MVP 和 R3M,CyberDemo 的成功之处突显了其效率和稳健性,以及其能够胜过在真实世界示范数据集上微调的模型。
CyberDemo 的创新方法通过利用增强的模拟数据挑战了解决实际问题必须依赖真实示范数据的传统观念。通过 CyberDemo 的性能所展示的经验数据,突显了通过数据增强增强的模拟数据在机器人操纵任务的价值方面能够超越真实世界数据。虽然为每个任务设计模拟环境需要额外的工作,但减少了数据收集的人为干预,并避免了复杂的奖励设计过程,为机器人操纵领域带来了一种可扩展且高效的解决方案。
论文地址https://arxiv.org/abs/2402.14795
项目地址:https://top.aibase.com/tool/cyberdemo
揭秘MCN机构内容生产流水线
各位村民好,我是村长。很多人十分好奇,一个专业的MCN机构,是如何标准化进行内容流水线式生产的。今天村长就简单和大家拆解一下,当然不一定对,毕竟每家都有差异。但核心想告诉各位两点:其一相比于个人,机构在内容生产上有成熟的团队、方法论和资金。其二当下内容赛道的竞争是很残酷,所以个人想要出圈,好内容永远是核心。01红人招募一般来说,MCN有两种招募方式。站长网2023-08-28 17:50:230000万元买手机很难吗?中美日韩等1月销量TOP 5:iPhone完爆安卓
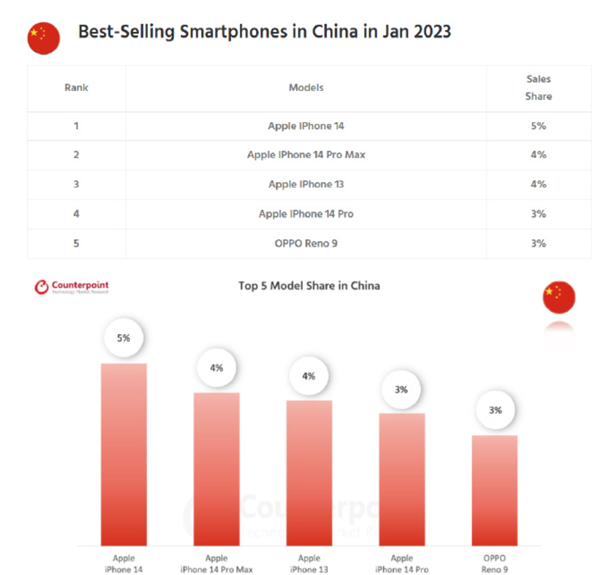
快科技4月15日消息,市场调研机构Counterpoint公布了全球2023年1月份,一些国家和地区的手机销量榜单,主要集中前五强,没有意外的是,苹果完全秒杀安卓阵营。先来看中国市场,销量最好的前四名手机都是iPhone,分别是iPhone14、14ProMax、iPhone13和iPhone14Pro,而安卓中入榜的是OPPOReno9。站长网2023-04-15 09:07:440000Interactive3D:可直接通过交互操作指导3D模型生成
Interactive3D技术为3D内容的创造和修改提供了一种极其灵活的方法。用户可以直接通过交互操作来指导3D模型的生成,这一过程不仅直观,而且具有高度的创造性。主要特点包括:组件添加与移除:用户可以像搭建乐高一样,通过添加或移除组件来对3D模型进行各种组合,实现个性化的模型构建。变形与拖动操作:支持可变形和刚性拖动等操作,使用户能够以更细致的方式调整和优化模型的每个部分。站长网2024-04-27 17:40:480000“争吵”中开启的双十一:平台与主播对垒,头部主播间正面PK
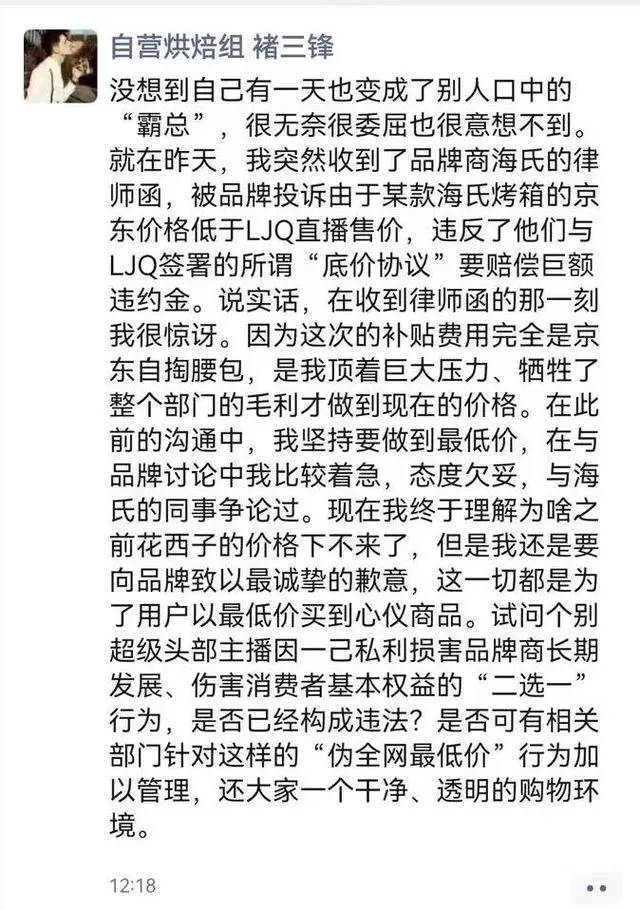
今年的双十一,群雄逐鹿,谁能问鼎?不同于以往,今年双十一,在各电商平台积极参与的同时,各平台大小主播们也都活跃在这个秋天。面对各个平台主播们的强势竞争,今年各电商平台也不再拘泥于过于复杂的促销玩法,而是纷纷主打最低价。于是2023年的双十一,形成了多足鼎力的局面;激烈的竞争也使得火药味越来越浓。因为就在双十一开启的第一天,一连串热点事件让这个购物节与众不同。新现象一:平台与主播对垒喊话站长网2023-10-26 09:13:160001巴菲特:苹果用户对品牌忠诚度极高 出价1万美元也无法撼动放弃 iPhone
沃伦·巴菲特和伯克希尔·哈撒韦公司是苹果公司的忠实粉丝,这已不是什么秘密,上个月,这家企业集团透露,它进一步扩大了其已经持有的大量苹果股票。在周三的一次新的采访中,巴菲特再次歌颂了苹果公司、首席执行官蒂姆·库克和iPhone的忠诚度。站长网2023-04-13 16:41:110000