DL3DV-10K数据集:可用于深度学习的3D视觉大规模场景
划重点:
🌐 研究人员介绍DL3DV-10K,这是一个大规模的多视图场景数据集,旨在解决神经视图合成(NVS)中的挑战,为深度学习三维视觉提供强大的数据支持。
📊 研究团队使用DL3DV-10K评估了现有方法,包括NeRF变体和3D高斯斑点,提出DL3DV-140作为性能基准,揭示了这些方法在各种真实场景中的强弱之处。
🚀 研究表明,通过使用DL3DV-10K预训练IBRNet,可以显著提高当前先进方法的性能,并强调大规模真实场景数据集在推动学习型通用NeRF方法发展中的重要性。
神经视图合成(NVS)在从多视图视频生成逼真的三维场景方面提出了复杂的挑战,尤其是在多样化的真实世界场景中。当前先进的NVS技术在面对照明变化、反射、透明度和整体场景复杂性的变化时,其局限性变得明显。为了应对这些挑战,研究人员致力于推动NVS能力的边界。
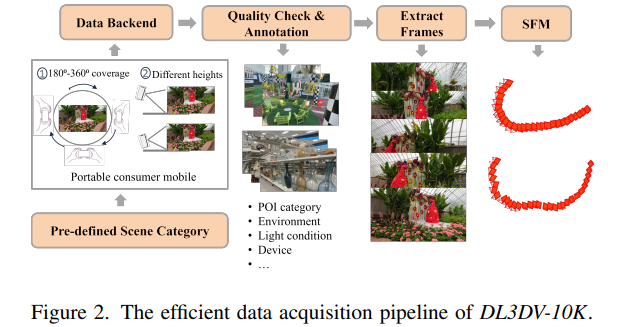
为了理解NVS,普渡大学、Adobe、罗格斯大学和谷歌的研究团队对现有方法进行了深入评估,包括NeRF变体和3D高斯斑点,使用新引入的DL3DV-140基准进行测试。该基准源自DL3DV-10K,这是一个大规模的多视图场景数据集,作为对NVS技术有效性的检验。为了应对已识别的局限性,研究人员引入了DL3DV-10K作为一个强大的数据集,为神经辐射场(NeRF)的通用先验开发提供支持。这个数据集被精心设计,涵盖了多样的真实场景,捕捉了环境设置、照明条件、反射表面和透明材料的变化。
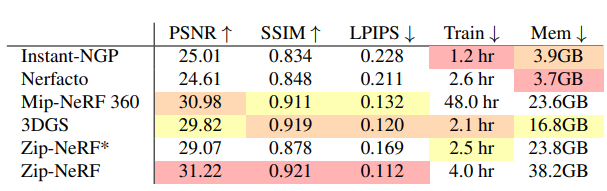
DL3DV-140在各种复杂性指标上审查了NeRF变体和3D高斯斑点,提供了对它们优势和劣势的见解。值得注意的是,Zip-NeRF、Mip-NeRF360和3DGS在PSNR(峰值信噪比)和SSIM(结构相似性指数)方面始终优于它们的对手,其中Zip-NeRF表现出色,在性能方面显示出卓越的表现。
研究人员仔细分析了场景复杂性的微妙差异,考虑了室内与室外设置、照明条件、反射类别和透明类别等因素。性能评估提供了对这些方法在不同情景下的表现有深入的理解。特别是,尽管使用默认批处理大小会占用更多GPU内存,Zip-NeRF表现出了强大的鲁棒性和高效性。
除了对SOTA方法进行基准测试外,研究团队还探讨了DL3DV-10K在训练通用NeRF中的潜力。通过使用数据集预训练IBRNet,研究人员展示了数据集在提高先进方法性能方面的有效性。实验证明,从DL3DV-10K的子集中获得的先验知识显著增强了IBRNet在各种基准上的通用性。这种实验为大规模真实场景数据集(如DL3DV-10K)在推动学习型通用NeRF方法发展中的作用提供了有力的论据。
这项研究深入探讨了神经视图合成,解决了当前方法的局限性,并提出DL3DV-10K作为一个重要的解决方案。全面的基准测试DL3DV-140评估了SOTA方法,并对它们在各种真实场景中的性能进行了检验。对DL3DV-10K在训练通用NeRF中的潜力的探讨强调了它在推动三维表示学习领域发展中的重要性。
随着研究团队引领创新方法,这项工作的影响超越基准测试,影响着NVS研究和应用的未来发展方向。数据集的先进和方法学创新的结合推动该领域朝着更加强大和多功能的神经视图合成能力迈进。
论文网址:https://arxiv.org/abs/2312.16256
项目网址:https://dl3dv-10k.github.io/DL3DV-10K/
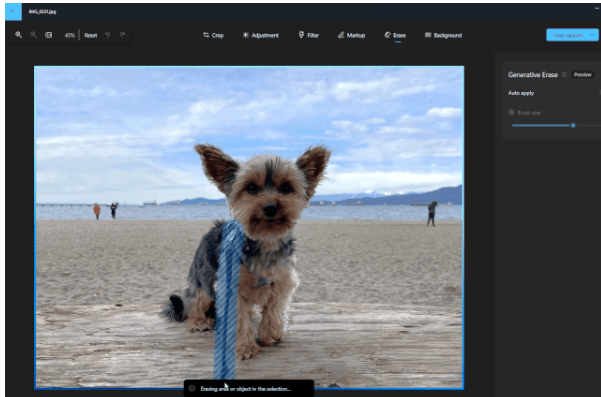
微软Windows10 和 Windows11 的照片应用增加AI橡皮擦功能
划重点:1.🚀微软宣布推出GenerativeErase功能,为Windows10和11的照片应用增加了类似MagicEraser的人工智能橡皮擦功能。2.📷这一功能使用户能够轻松进行图像中的AI移除操作,提高了照片编辑的便捷性和效果。3.💡GenerativeErase标志着微软在图像处理领域的不断创新,为用户提供了更丰富的编辑工具和体验。站长网2024-02-23 10:31:030000AI视频编辑工具InVideo 内置800万+免版权素材库,支持文转语音
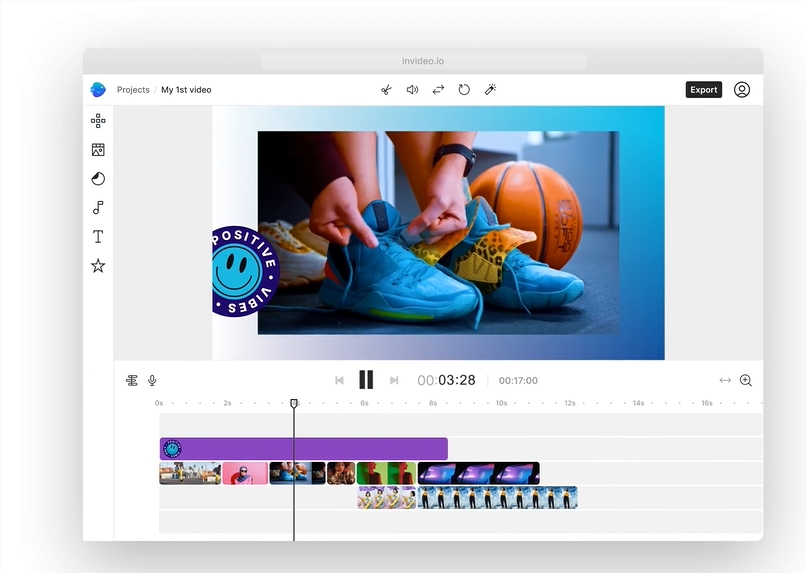
InVideo是一款视频制作平台,提供多种模板和工具,让用户制作高质量的营销视频、社交媒体视频和演示文稿视频等。InVideo提供在线视频编辑服务,帮助您通过专业模板、图片和音乐制作高质量视频。InVideo拥有AI辅助创作功能,可一键生成视频脚本和把文章转换成视频。体验地址:https://invideo.io/站长网2023-08-30 15:06:54000321天长续航、屏幕亮度翻倍!小米手环9正式发布:249元起
快科技7月19日消息,在今天新品发布会上,小米正式发布了诸多新品,其中就包括小米手环9。小米手环9共有三个版本,具体价格如下:小米手环9标准版:249元小米手环9NFC版:299元小米手环9NFC陶瓷特别版:349元站长网2024-07-21 02:58:36000025个大事件,回顾微信“不再克制”的2024
2024年,你最关注的微信大事件是什么?对于公众号创作者,答案或许是文章终于支持修改标题;对于商家来说,或许是“送礼物”功能上新;对于用户来说,或许是朋友圈刷到了live图。过去一年,我们注意到:视频号在本地生活和短剧赛道的发力投入,“内容助推”等功能上新给予公众号内容更多流量扶持,更名后的“微信小店”有望成为微信最新红利......0000比起Alphabet,AI革命可能对亚马逊和 Meta 更有利
**划重点:**🌐人工智能可能成为数字平台的下一个重要步骤,可能在某些地方甚至取代传统互联网。💡分析师指出,亚马逊和Facebook旗下的Meta平台在这一未来中看起来比谷歌的母公司Alphabet更具投资价值。0000