可直接复制人类操作给机器人
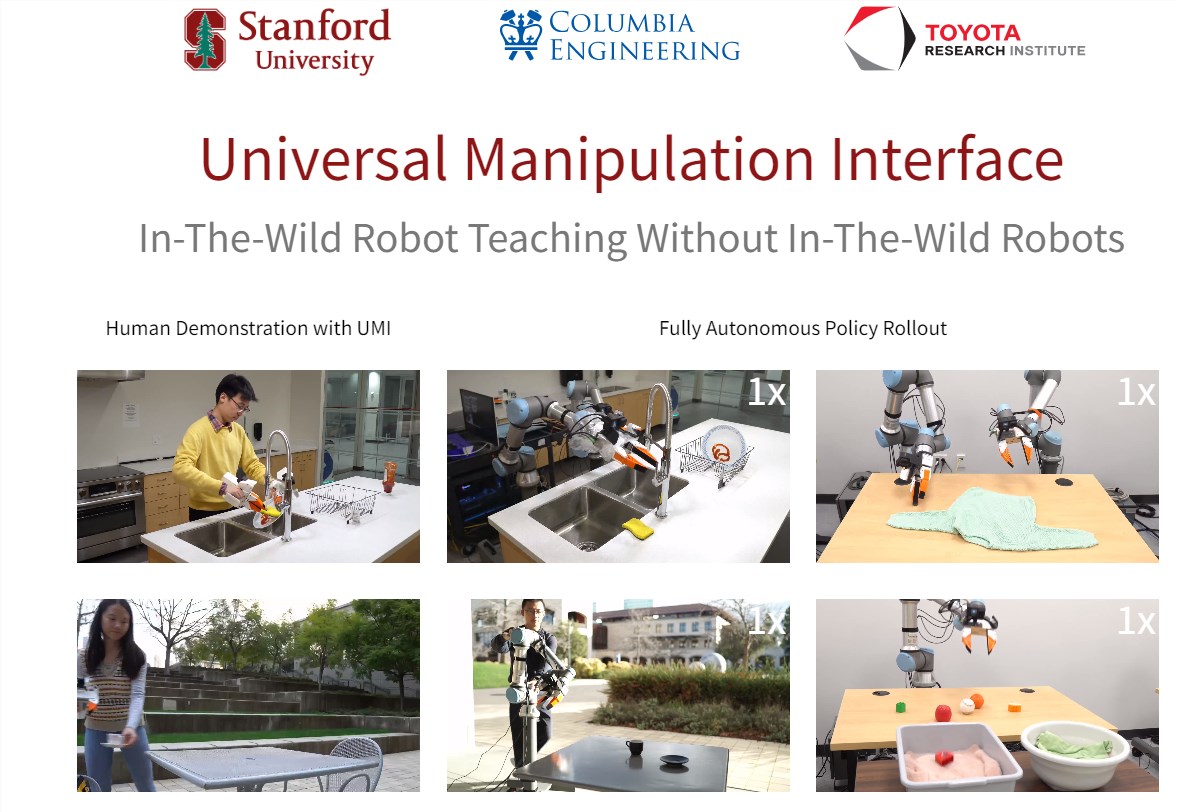
斯坦福开发机器人学习框架UMI 可直接复制人类操作给机器人
UMI是斯坦福开发的一个机器人数据收集和策略学习框架,通过手持式夹持器和精心设计的接口进行数据收集。该框架能够将人类在复杂环境下的操作技能直接转移给机器人,无需人类编写详细的编程指令。通过人类亲自操作演示然后收集数据,直接转移到机器人身上,使得机器人能够快速学习新任务。UMI整合了精心设计的策略接口,包括推理时延匹配和相对轨迹动作表示,使得学习到的策略不受硬件限制,可跨多个机器人平台部署。站长网2024-02-22 17:20:110003

热点
前Meta高管:如果强制执行版权许可, AI行业将“一夜之间垮掉”!
2025-05-28 17:01:41调查显示:80% 的 Z 世代愿意与 AI 结婚
2025-05-29 14:58:09微软将 Wins11 的“智能应用控制”夸大宣传为“杀毒解决方案”
2025-05-29 14:57:31腾讯将收购 Hybe 持有的所有 SM 股份,规模达 2433 亿韩元
2025-05-29 14:56:32小米张国全:澎湃OS 2发布以来改善1858项体验问题
2025-05-29 14:52:53“不要以关税为借口提高iPhone价格”,白宫再次向苹果施压
2025-05-28 17:18:18WordPress 宣布组建 AI 团队
2025-05-28 17:10:02Salesforce 以 80 亿美元收购数据公司 Informatica
2025-05-28 17:06:28OpenAI 或将推出“使用ChatGPT登录”功能,支持第三方应用接入
2025-05-28 17:00:43Anthropic 开始给 Claude 搞“语音模式”了
2025-05-28 16:57:18
关注
Mythik获1500万美元种子轮融资,要成为“东方迪士尼”
2025-05-26 15:15:05
手机满意度跌至 10 年来的水平,AI人工智能只是部分原因
2025-05-26 15:13:49
OpenAI 进军硬件领域,将收购 Jony Ive 的 AI 创业公司
2025-05-26 15:13:15蜜雪冰城回应网友倒卖柠檬水赚差价,网友:这违法吗?
2025-05-26 15:13:06
苹果开放 AI 模型……计划于下个月在 WWDC 上发布
2025-05-26 15:12:02马斯克:特斯拉将于 6 月底在奥斯汀启动 Robotaxi 试点
2025-05-26 15:11:44
谷歌推出 Beam AI:将普通视频通话,转为逼真的 3D 沉浸式体验
2025-05-26 15:10:44本田大幅削减电动汽车投资,将重点转向混合动力汽车及柔性制造
2025-05-26 14:29:29骆歆 Rita 领衔!《剑侠情缘?零》明星主播天团助阵公测
2025-05-26 14:28:30谷歌推出 250 美元的 AI Ultra 套餐,重新定义“高端”
2025-05-26 14:25:26