创新3D技术Gaussian-SLAM 通过分析视频重建逼真的3D场景
Gaussian-SLAM是一项新兴技术,可以通过分析视频流中的图像来创建逼真的3D模型,从而重建现实世界场景。
通过观看一个视频,Gaussian-SLAM可以分析视频中的图像,能够理解视频中的环境布局和物体的位置。然后利用这些图像数据来创建、还原可以从各个角度观察的3D模型,重建现实世界场景。这一过程是实时渲染的,可以帮助用户在计算机上查看和探索3D虚拟环境。
论文地址:https://ivi.fnwi.uva.nl/cv/paper/GaussianSLAM.pdf
项目地址:https://github.com/VladimirYugay/Gaussian-SLAM
演示地址:https://vladimiryugay.github.io/gaussian_slam/
举例来说,如果你有一个在公园拍摄的视频,其中包括树木、长椅、小路和行人等物体。传统的视频只能提供二维视角,但是使用Gaussian-SLAM技术,我们可以分析视频中的各个物体,并了解它们在空间中的相对位置。
通过分析视频中物体的移动和视角变化,Gaussian-SLAM可以计算出这些物体在三维空间中的位置和形状。最终,这项技术可以创建一个公园的数字复制品的三维模型,使用户可以从任何角度查看公园的每个角落,包括树木、长椅和人们的活动。
Gaussian-SLAM的主要功能特点和工作原理如下:
主要功能特点:
1、光学真实的渲染:能够以高度真实的方式重建和渲染真实世界和合成场景。
2、高斯斑点场景表示:使用高斯斑点作为场景的主要表示单位,这是一种新颖的方法,与传统的点云或网格表示不同。
3、交互式时间重建:允许在交互时间内重建场景,即重建过程足够快,可以实时渲染或近实时进行。
4、适用于单目RGBD输入:针对单目RGBD(红绿蓝深度)输入数据进行优化,适用于多种场景。
Gaussian-SLAM特别针对的是RGBD摄像头的输入数据进行优化,这种摄像头除了捕捉普通的彩色图像外,还能提供每个像素点的深度信息,对于创建准确的三维场景模型至关重要。
工作原理:
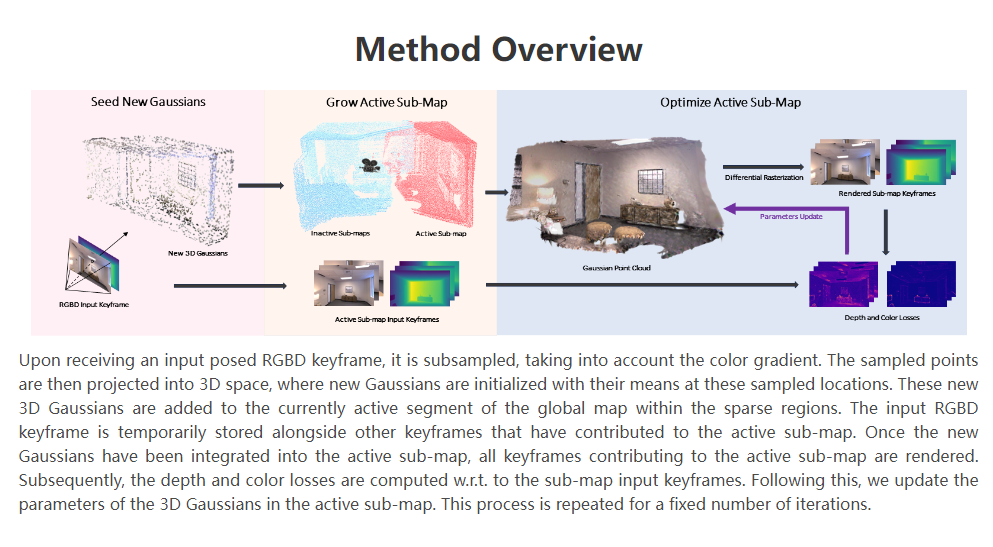
Gaussian-SLAM的工作原理主要包括数据处理、3D高斯初始化、场景构建、关键帧存储与渲染以及优化与更新。通过接收RGBD关键帧输入,进行子采样并考虑颜色梯度,将采样点投影到3D空间,在这些采样位置初始化新的高斯,新的3D高斯被添加到全局地图的当前活动部分中,形成场景的一部分。输入的RGBD关键帧暂时存储,与对活动子图有贡献的其他关键帧一起,并渲染所有对活动子图有贡献的关键帧,最后计算与子图输入关键帧相关的深度和颜色损失,然后更新活动子图中3D高斯的参数。
应用场景:
Gaussian-SLAM适用于需要高度真实感和精确度的SLAM应用,如自动驾驶、机器人导航、增强现实和虚拟现实等。这项技术的出现为模拟现实世界和创造逼真的虚拟环境提供了新的可能性。
Google DeepMind 联合创始人加入微软,担任新 AI 部门 CEO
划重点:-🤖MustafaSuleyman离开Google,成立了人工智能初创公司。-🤖MustafaSuleyman加入微软,担任新AI团队的CEO,负责消费者AI产品。-🤖微软继续投入AI领域,与OpenAI和Mistral等公司展开合作。站长网2024-03-20 12:00:150000华晨宇公司新增人工智能APP应用软件开发业务
企查查APP显示,近日,北京宇屹文化传媒有限责任公司发生工商变更,经营范围新增人工智能应用软件开发;专业设计服务;图文设计制作等。北京宇屹文化传媒有限责任公司成立于2017年11月,华晨宇为执行董事、经理、法定代表人、实际控制人,持股比例达99.90%。站长网2023-07-31 11:19:590000新规来了!探店视频挂链接将视为广告,乱象该停止了......
监管之风,吹向了乱象丛生的探店内容赛道。近日,有消息称,《互联网广告管理办法》即将在5月1日实施,其中提到“通过知识介绍、体验分享、消费测评等形式推销商品或者服务,并附加购物链接等购买方式的,广告发布者应当显著标明‘广告’”,而大众所熟悉的达人探店类短视频内容,属于该规定范围内。这意味着,以后探店视频要么不再能挂上链接,要么就变成广告。站长网2023-04-26 09:05:250000司乘聊天被弹窗提醒?滴滴回应:纯属谣言
昨日,滴滴出行发布了一份《关于司乘聊天被弹窗提醒"的澄清说明》,针对近期网络上流传的视频,声称车内和司机聊收入会被滴滴弹窗提醒"的传闻进行了回应。滴滴表示,经过与司乘双方核实及对系统后台的仔细排查后,证实这一传闻纯属谣言。在该行程中,滴滴App并未出现所谓的弹窗提醒,更未就司乘交流内容有任何语音播报或提醒。目前该谣言的原发作者已删除不实内容。站长网2023-11-15 18:08:510000喜茶×FENDI,联名生意卷到奢侈品牌?
现在这个问题的答案能够十分清晰的给出:一杯喜茶联名FENDI新品「FENDI喜悦黄」的出餐时间。5月15日,喜茶发布了次日将公布全新联名的预告,评论区就有网友猜测合作方是FENDI。但到了16日,喜茶并没有如约官宣。(图源网络)站长网2023-05-21 10:05:410000