Meta推出AI模拟环境Habitat 3.0 为机器人训练提供更真实的场景
要点:
1. Meta Platforms Inc.的研究团队发布了AI模拟环境Habitat的进阶版本Habitat3.0,用于教授机器人如何与物理世界互动。
2. 发布了Habitat Synthetic Scenes Dataset,这是由艺术家制作的3D数据集,可用于训练AI导航代理,以及HomeRobot,一个用于模拟和现实世界环境的廉价机器人助手硬件和软件平台。
3. Habitat3.0支持机器人和人形化身,使人与机器人可以在多个任务上进行协作,这意味着开辟了新的研究领域,关注人机协作在多样化、现实任务上的应用。
FAIR团队最新推出的Habitat3.0引起了广泛关注,这是一个令人激动的增强型AI模拟环境,旨在训练机器人在真实场景中进行导航。这一创新的推出对于提升AI模拟环境的仿真程度具有重要意义。
通过Habitat3.0,机器人可以在更真实的场景中接受训练,从而更好地适应复杂多变的真实世界环境。这种独特的训练方法可以显著提高机器人的智能水平和性能,使其在面对各种挑战时能够更加从容应对。
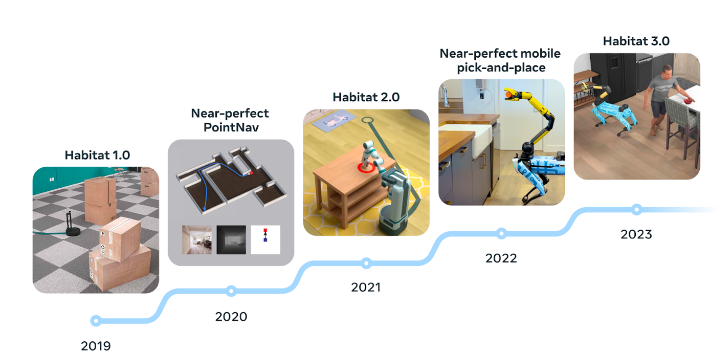
Habitat3.0代表了他们在所谓的“具身化AI”领域的不断进展,这意味着AI代理能够感知和与其环境互动,与人类合作,并在数字和物理世界中与人类伙伴安全共享环境。Habitat包含了虚拟环境的目录,如办公空间、家庭和仓库,可用于培训和优化AI驱动的机器人在现实世界中的导航。这些虚拟环境以极致的细节构建,使用红外捕捉系统精确测量物体的形状和大小,包括桌子、椅子甚至书籍。在这些环境中,研究人员可以训练机器人完成需要看到和理解周围环境的复杂多步任务。
Habitat3.0在这些现有功能的基础上增加了对机器人和人形化身的支持,使人类和机器人可以在许多不同任务上协作。例如,人类和机器人可以一起清理客厅或准备厨房食谱。根据研究团队的说法,Habitat3.0中的人形化身非常逼真,具有自然的步态和动作,从而实现了最逼真的低级和高级互动。
这一新的模拟环境允许机器人AI代理学习与人形化身一起在家居环境中执行日常任务,并在真实人类参与的情况下进行评估,从而有助于减少机器人学习所需的时间,加快新模型在安全的模拟环境中进行测试的速度。
除了Habitat3.0,还发布了Habitat Synthetic Scenes Dataset(HSSD-200),这是一个3D场景模拟数据集,用于训练机器人。相比之前的数据集,HSSD-200更准确地模拟了现实世界场景,包括多样的物体模型和物体的语义分类。这将有助于加速具身化AI研究,因为准确的3D模拟对于训练机器人至关重要。
最后,研究团队还引入了HomeRobot库,这是一个硬件和软件规范,供希望在现实世界中应用其Habitat训练模型的研究人员使用。HomeRobot基于用户友好的软件堆栈和廉价的硬件组件构建,意味着可以快速设置并准备进行现实世界的测试。它专门设计用于开放词汇的移动操作研究,这意味着机器人可以在任何未知环境中捡起物体并将其放在指定位置,从而必须能够感知和理解他们遇到的新场景。
总的来说,Meta的这一系列发布表明他们在培训和测试智能机器人方面取得了真正的进展,特别是在虚拟世界中进行的培训。这一进展将有助于加速机器人在日常生活中的应用,尤其是在人机互动方面的应用。未来,他们将继续研究机器人如何在不断变化的动态环境中与人类合作,以更好地适应我们生活的现实世界。
谷歌内部推出AI大语言模型Goose 主打代码编写、产品研发
据BusinessInsider报道,近日,谷歌内部秘密开发了一款名为“Goose”的人工智能大语言模型,据知情人士透露。这款AI工具被特别设计给谷歌工程师使用,融入了公司25年的技术积淀,目的是大幅度提高内部团队的工作效能,特别是在代码编写和新产品研发方面。站长网2024-02-18 09:13:340000抖音回应雷军、余承东直播间被封:开车期间直播不被建议
雷军和余承东在抖音车内直播时被封禁的事件,引发了网友的广泛关注。对此,抖音集团副总裁李亮在微博上做出了回应,明确表示抖音平台不建议在开车期间进行直播。李亮指出,如果确实需要进行直播,可以由副驾驶或后座乘客进行拍摄,但直播不能干扰驾驶。驾驶员需要专心驾驶,不能与直播间进行互动,也不能查看手机。站长网2025-01-28 10:58:510000人机交互初创公司 Figure AI 正计划融资,微软和 OpenAI 或领投
据彭博社消息,知情人士透露专注于研发人机交互技术的初创公司FigureAIInc.正在进行融资谈判,计划在一轮融资中筹集至多5亿美元,由微软和OpenAI领投。图源备注:图片由AI生成,图片授权服务商Midjourney站长网2024-01-31 09:18:190000内卷的咖啡,压垮失控的打工人
流水线作业,新时代的“进厂打螺丝”在一众全自动咖啡机面前,使用半自动咖啡机的Manner有他们自己的坚守。其创始人韩玉龙曾解释,“不想要机械化,不想抹杀掉每一个咖啡师的个性,这应该是一个有感情的行业。我们希望每一个咖啡师都有自己的客人和粉丝。我们也会有技术手段让咖啡的容错率更高。”然而现实是,每天300-500个咖啡订单面前,咖啡师最终沦为一个个没有感情的机器。站长网2024-06-29 22:14:310003谷歌 Chromebook 推出专属 Google AI 的新按钮
站长之家(ChinaZ.com)10月3日消息:Google宣布推出两款新的Chromebook——三星的GalaxyChromebookPlus和联想的ChromebookDuet11,并引入了一个全新的按钮。这个按钮被称为「QuickInsert(快速插入)」,旨在为用户提供快速访问Google最新AI功能的途径。0000