DeepMind新机器学习模型UniSim:模拟现实以训练机器人和游戏角色
划重点:
- Google DeepMind与多所大学合作,研发出一款新的机器学习模型UniSim,用于创建逼真的模拟环境,用于培训各类人工智能系统。
- UniSim的特点是能够模拟现实世界的互动,包括高级指令和低级控制,为其他需要真实世界数据的模型提供训练示例。
- UniSim的应用潜力广泛,包括培训机器人、游戏角色,以及填补模拟和现实世界之间的鸿沟。
谷歌 DeepMind 的研究人员与加州大学伯克利分校、麻省理工学院和阿尔伯塔大学合作开发了一个名为UniSim的机器学习模型,可以为训练各种人工智能系统创建真实的模拟。
研究人员表示,下一个生成模型的重要里程碑是模拟人类、机器人和其他互动实体采取行动时的逼真体验,而UniSim正是他们希望实现这一目标的工具。UniSim被描述为一个“通用的现实世界互动模拟器”。
尽管UniSim仍处于早期阶段,但它已经展现了实现这一目标的第一步。UniSim可以成为需要复杂真实世界互动数据的领域的宝贵工具,例如机器人技术和自动驾驶汽车。

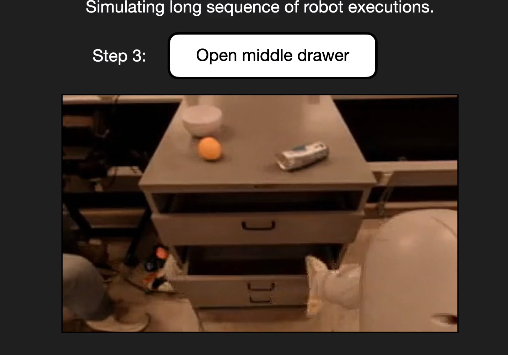
UniSim是一种生成模型,可以模仿人类与环境以及其他实体之间的互动。它能够模拟高级指令(如“打开抽屉”)和低级控制(如“移动到x,y坐标”)的视觉效果。这些模拟数据可以用作其他需要真实世界数据的模型的训练示例。
UniSim的数据源非常广泛,包括互联网文本-图像对、导航、操作、人类活动、机器人数据以及模拟和渲染等。研究人员将这些多样的数据格式整合成一个统一的格式,通过使用Transformer模型和扩散模型进行编码和生成,将观察、行动和结果联系在一起。
UniSim还具有生成逼真视频的能力,包括人物执行各种动作和环境导航。它还能够执行长时间模拟,例如机器人手执行多个动作的序列。
此外,UniSim还能生成“随机环境转换”,例如揭示毛巾下的不同物体,这对于计算机视觉应用中的模拟反事实和不同场景非常有用。
UniSim的真正价值在于与强化学习环境的整合,这使得UniSim可以在机器人等应用中模拟各种结果,无需真实世界训练。这一方法的优势包括无限的环境访问、接近真实世界的观察以及对时间控制频率的灵活性。
UniSim有广泛的应用前景,包括在游戏和电影中创建可控内容,以及在模拟中培训直接用于现实世界的虚拟实体。UniSim还可以为视觉语言模型提供大量的训练数据,这对于需要执行复杂多步任务的模型非常有益。研究人员还指出,UniSim可用于培训高级视觉语言规划器、低级强化学习策略等多种模型。
UniSim还可以模拟罕见事件,这一特性在机器人技术和自动驾驶汽车等领域特别有用,因为数据收集可能既昂贵又有风险。尽管UniSim的培训成本相对较高,但研究人员希望它能够引发广泛的兴趣,以改善机器智能。
英国大型律师事务所推出撰写合同的AI工具ContractMatrix
**划重点:**1.🚀Allen&Overy推出的ContractMatrix是一款AI工具,可为律师起草标准法律合同。2.💼已有1000多名Allen&Overy律师使用该工具,五家企业客户计划在明年一月试用。3.💡该工具与Microsoft和AI初创公司Harvey合作开发,旨在提高律师效率、降低成本。0000放弃4300W粉丝和年入5000W,从“疯产姐妹”单飞的邵雨轩后悔了
没想到时隔2年,“疯产姐妹”突然回归,邵雨轩和张小花又合体了。还有人记得这对曾经选择解散的姐妹花吗?她们拍摄搞笑和整蛊闺蜜的互动视频,两年时间曾在抖音涨粉超过4300W。在张小花的镜头下,邵雨轩是毫不在意形象的搞笑女,她爱吃爱护食,因发际线高,被送外号“贝勒爷”。不过偶尔她也能捡起颜值,跟超模拍照都不会逊色多少,因此又真实又接地气的吸引了很多人喜欢。站长网2024-06-12 01:00:400000比iPhone 15 Pro Max还轻!荣耀V Purse折叠屏仅重214g
快科技9月19日消息,今晚荣耀VPurse折叠屏新机正式登场,时尚的钱包”外观十分吸睛。除了精致外表,荣耀VPurse折叠屏在重量上碾压直板机。据介绍,荣耀VPurse仅重214g,作为对比,华为Mate60Pro重225g,iPhone15ProMax重221g,可以看出荣耀VPurse在重量控制方面做的十分优秀,轻过几乎所有主流直板旗舰。站长网2023-09-19 20:55:070000菜鸟发布春节保障措施:158城照常寄 快递员收入达日常三倍
快科技1月15日消息,菜鸟宣布,今年春节期间,菜鸟速递在全国158城提供上门配送、揽收等服务。春节期间,菜鸟速递将重点保障民生类物资的寄递,目前包括天猫超市、阿里健康以及部分头部保暖鞋服企业,均已经接入菜鸟速递的春节服务。为了让消费者春节期间也能方便的退换货,在这100多城里,菜鸟速递也开通上门揽收服务。此外,快递员权益保障也受到重点关注,留守值班快递员揽派收入可以达到日常三倍。00002023值得购买的旗舰机有哪些?看完这篇超全的机型盘点就够了!
如果您喜欢我的文章,欢迎您点击左上角的“关注”后续将第一时间为您带来最新手机资讯!现在已经来到了2023年,相信很多人都有换手机的需求。但是又苦于不知道选择哪款,所以接下来,我来盘点一下各个品牌值得购买的旗舰机。处理器:高通骁龙8Gen2摄像头:后置:5000万5000万5000万像素前置3200w像素续航:4820mAh电池120w快充无线50W站长网2023-05-24 00:28:130000