仿生机器人平台Faive
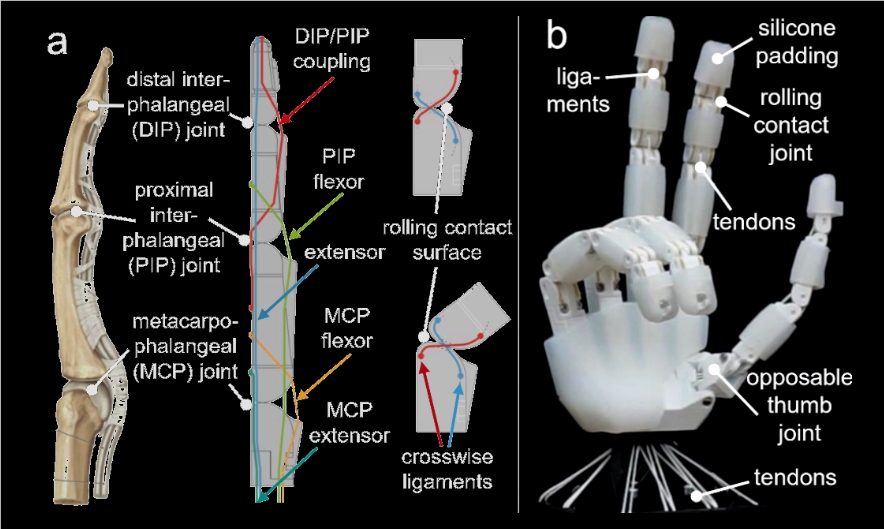
仿生机器人平台Faive Hand:机械手可具备更灵活的操作能力
FaiveHand是一款生物仿生的韧带驱动机械手,具备11个可操控的自由度,旨在为灵巧操作研究提供低成本的硬件平台。通过使用滚动接触关节设计,该机械手实现了三维打印、稳定可靠的高自由度手部设计。该产品旨在为许多研究机构提供低成本的硬件平台,加速人型机器人手在实际应用中的应用。特点:站长网2023-08-09 15:14:480000

热点
《哪吒2》改写中国影史背后,这些配角燃爆了社交媒体
2025-02-10 03:21:53DeepSeek下棋靠忽悠赢了ChatGPT,网友:孙子兵法都用上了
2025-02-10 03:17:44字节跳动放大招!OmniHuman数字人模型即将上线:一张图+一段音频即可生成视频
2025-02-10 03:06:06为训练AI不择手段!Meta被曝下载数十TB盗版电子书
2025-02-10 08:38:57中国AI新秀爆火 DeepSeek成史上最快突破3000万日活App
2025-02-10 08:38:56雷军驾驶小米YU7参与冬测:表现不错 测试任务圆满完成
2025-02-10 05:11:19用DeepSeek“赚钱”网课泛滥 专家:普通用户不用花钱学
2025-02-10 05:11:18索尼PSN严重宕机!超过24小时才恢复:实体游戏零售商在线补刀
2025-02-10 05:11:17京东外卖“低佣”入局,美团回应“30%高佣”质疑
2025-02-10 05:11:12|美团开放个人摄影师入驻,搅热500亿市场?
2025-02-10 03:41:55
关注
消息称特斯拉Model Q年中发布:仅需人民币15万元
2025-02-05 23:25:20《哪吒2》登顶,谁赚麻了?
2025-02-07 15:41:39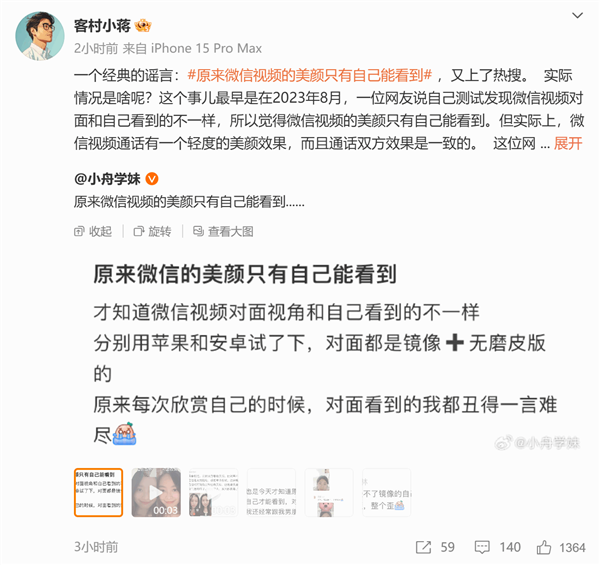
微信视频美颜仅自己能看到引热议 微信员工:谣言 双方都能见
2025-02-04 22:10:55雷军去小米汽车工厂上班了:确认要进一步提产 冲击年销30万辆
2025-02-07 15:06:26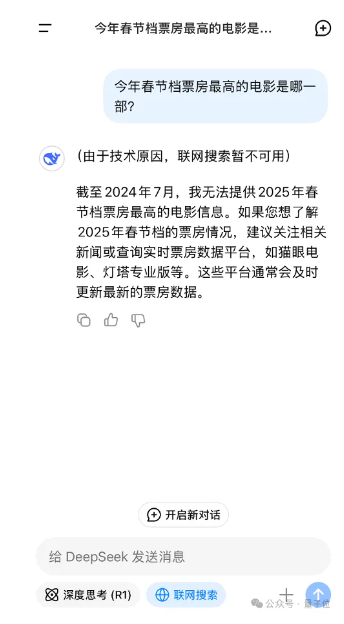
国产AI搜索接入DeepSeek-R1,深度试玩报告抢先出炉:正愁用不上官方联网搜索
2025-02-04 21:56:29小米眼镜官博上线 旗下首款AI眼镜将发布
2025-02-07 10:20:34
被DeepSeek干服了!OpenAI承认闭源错误,领先优势变小
2025-02-04 20:22:14
模型优惠进入倒计时 DeepSeek因服务器暂停API服务充值
2025-02-07 03:18:38
用百度AI拜年,奶奶比我更上头
2025-02-04 20:17:07
小米眼镜官微上线:智能眼镜赛道要爆发
2025-02-07 02:59:11


