打破波士顿动力空翻专利后,国产人形机器人左手拧螺丝,右手咖啡拉花
全球首次以「电驱机器人」打破波士顿动力空翻专利的那家机器人公司,不藏了!
旗下人形机器人的更多技能技巧,被摆到台前。
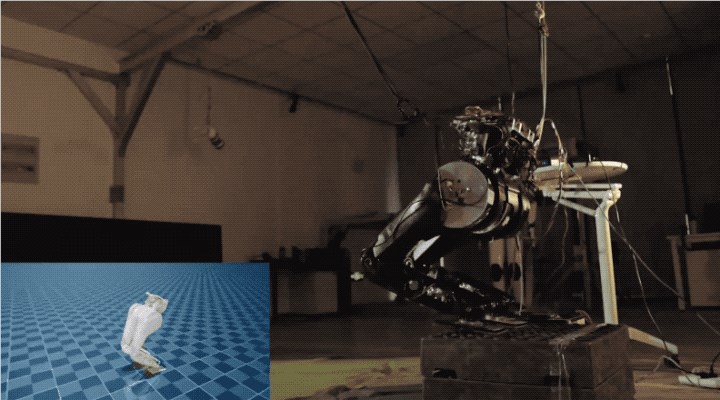
其实,它还会一些精细活:做咖啡。

而且是全球首个实现自主咖啡拉花的人形机器人。
只见他左右晃动拿着拉花杯(打奶缸)的手腕,不紧不慢:

然后你将得到:
然后事了拂衣去,深藏功与名:
除了在咖啡馆中进行高精度自主咖啡拉花,它还能为工厂员工分发夜宵、在室内外场景担任领路员。
甚至能帮咱遛狗。

正式介绍一下,背后公司MagicLab,专注于通用机器人技术和AI技术,听说走的还是全球化路线。
人形机器人只是它们产品线里的一员,仿生四足机器人、工业四足机器人、通用人形机器人等,都是这家公司计划中(并且正在推进)的一部分。
瞄准的落地场景也很广泛,覆盖家庭、工业、商业等。
据了解,3C场景的落地应用正在开发中,预计年底将在产线开展试运行。

在生产车间内执行清洁设备的性能测试,效率提高了30%,同时减少了70%的人工干预需求。
自研伺服电机,大模型也都用上了
MagicLab团队主攻机器人核心力矩电机关节、机械臂、足式机器人等通用机器人核心技术。
团队认为,通用机器人的终极形态一定是人形机器人。
从技术上来讲,团队主要专注于解决硬件和算法两方面的难题。
硬件方面,团队选择自研伺服电机以及核心零部件,以此来做能力延伸。
力矩电机关节模组设计致⼒于提⾼电机的功率密度⽐和转矩密度,包括谐波模组关节、直线模组关节,以及⼩型和微型伺服单元。
⽬前团队拥有的电机系列,覆盖了从10N.m到500N.m的扭矩范围。

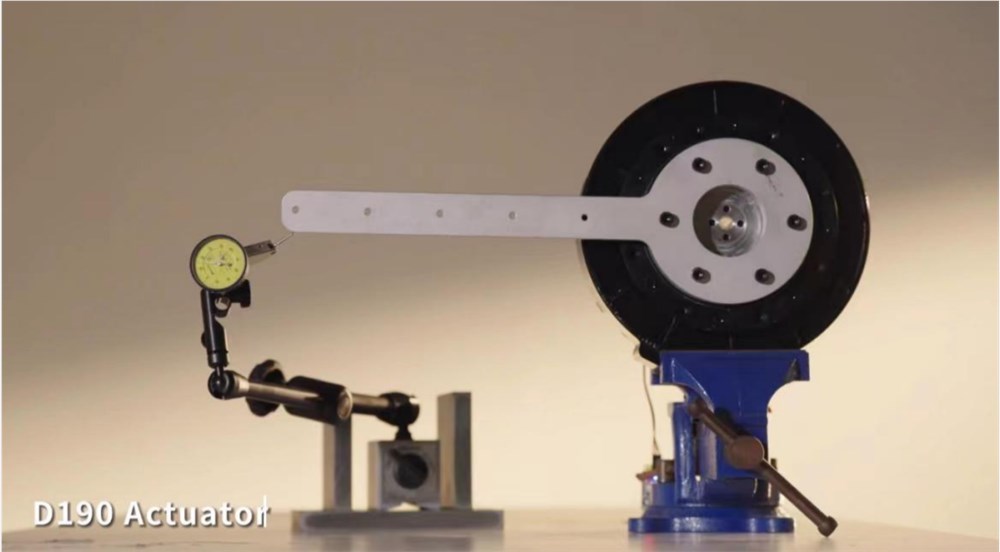
之前让电驱人形机器人完成空翻,就得益于MagicLab全新的关节设计。
自研D190关节模组额定输出力矩达150Nm,最高输出则超过525Nm,可在110RPM的转速下工作,高功率的关节配合上为空翻特别设计的驱动器,能够应对空翻过程中反电势波动产生的瞬间高电压和低压。
机器人的机械结构设计中还调整了机器人的重量分布,将大部分重量集中在大腿根部,减少了摆动腿部过程中的惯量。
在跳跃和翻转过程中机器人可快速调整重心,保持稳定并成功着陆,还能保持敏捷性和精确控制。
自研还有一个好处是可以整体考虑软件与硬件的协同优化,用相对低成本的硬件发挥出可用的运控能力,不断迭代落地,降低成本。
算法上,团队应⽤多模态的⼤模型,基于⼤模型的通识能力,能够应对复杂场景中的多任务的物理表征感知和客观物理事实理解,并形成类人的行为决策。
全身控制大模型⽅⾯,基于强化学习的运控小模型和基于技能库的操作小模型,可以充分解耦环境和对象、自身执行体、操作物理特性,以做出仿人化的柔顺、鲁棒、通用的全身控制。
最后,通过图形化界⾯,结合以上两个⼤模型,⽤户可以轻松设计和部署机器⼈应⽤,实现多模态的⼈机交互、场景任务感知与⾃主决策。
从具体例子来看,机器人咖啡拉花要克服的难点,不仅是要会简单拉花,团队表示之后还想让机器人能复刻咖啡大师的手艺。
它需要在开放空间里与人进行交互,这意味着它所处的空间位置和运动轨迹会有许多不确定性,同时需要识别不同材质及尺寸的工具。
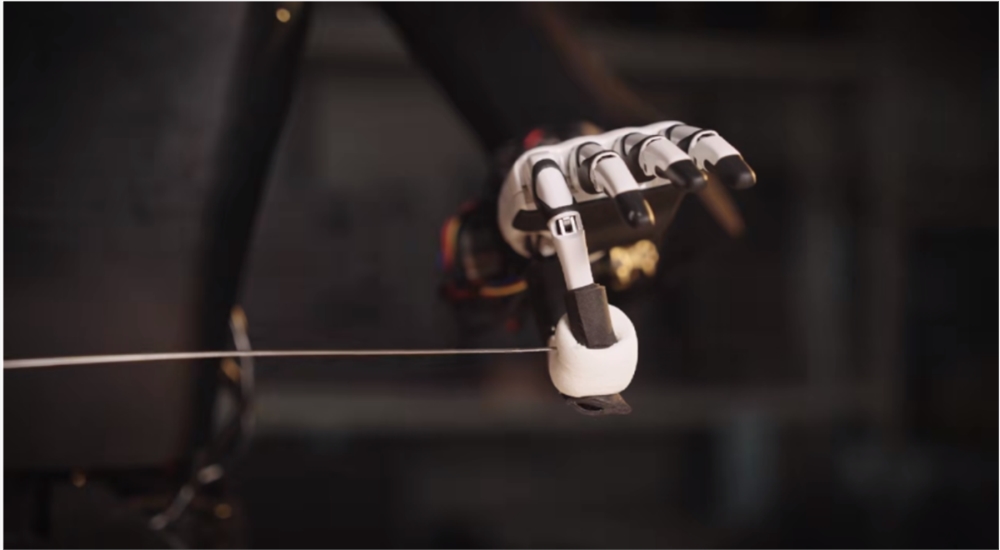
作为人形产业链中的核心零部件,灵巧手也是团队重点开发的硬件,该方向团队采取了分代迭代的策略:
成熟一代、预研一代、储备一代。
目前已经可以实现亚毫米级的定位精度和数千克的负载能力。
基础版本是11自由度设计,其中有6个主动自由度。拇指分布两个主动⾃由度,可⽤于弯曲和侧摆,使得灵巧⼿可以模仿⼈类⼿部的各种动作,包括握拳、张开、指向、捏取、拨弄等。
此外还引⼊了⼒控制和指尖触觉感知,通过本体的⼒矩传感器反馈来实现精确控制。⽆论是什么形状、⼤⼩和材质的物体,哪怕是脆弱、滑动或者变形的物品,也能轻松抓取。
之后团队计划引入触觉感知和更高自由度的设计。
定义人形机器人的「M0-M4」
一番交谈下来,MagicLab团队的未来计划和目标还是非常明确的。
面对当下的发展阶段以及未来观望,MagicLab将人形机器人场景落地级别分为M0-M4五个阶段。
咱们把这五个阶段的划分标准掰开了说说。
首先是M0。
M0是实验室产品,没有面向明确的场景。
从研发角度,很多人可能会不计成本地去堆砌一些软硬件,没有做任何清晰的成本控制,即使有人从科研的角度进行购买,但也没有办法真正进行商业落地。
到了M1,这阶段的人形机器人比较像是一个实习生,针对特定的商用和工业场景的局部做一些应用。
比如让人形机器人倒一杯水,跳一支舞,做一杯带拉花的咖啡。
从研发角度来看,M1阶段已经可以基于特定场景、特定任务等需求做产品和成本的优化;但泛化性远远不足,因此不太能称得上是一个真正实用的产品,也很容易陷入商业化难题。
M2,则可以被定义为熟练工了。
这个级别的产品需要能在特定的商用和工业场景中,实现场景闭环,也就是真正能替人去干一些事。
采购方可以算一笔采用人形机器人硬件和人工成本的经济账,来判断商业化可行性。
也是这一阶段,人形机器人才真正走到了商业化门口。
MagicLab把M3阶段的人形机器人定义为“像一个保姆”。
这时候,人形机器人已经可以进入家庭,完成陪伴、家务、养老等任务。
“但我们充分认知到,要实现这个目标之前,还需要对大模型及硬件的泛化能力做充分提升。”MagicLab研发负责人周扬说,要到达这个阶段,整个行业都还要花费巨量时间去探索。
最高等级M4,MagicLab称之为物理世界的Siri,即真正的通用机器人。
可以实现一机多用——具体有多多用,完全取决于人形机器人的硬件水平。
不过,M4级别的人形机器人必须通用、完全融入社会,说不定闲时可以出门打工赚钱(???)。
MagicLab团队告诉我们,长远目标是做M3到M4级别的产品。
目前自家旗下的人形机器人目前处于M1向M2进化的过渡阶段,同时着力推动M2级别的落地。
让机器人走出实验室
MagicLab成立于去年12月中旬。
迄今为止,已经发展成了100多人的团队。成员来自全球,其中80%以上为研发人员。
团队主攻机器人核心力矩电机关节、机械臂、足式机器人等通用机器人核心技术,在算法层面也小有成就,如运控算法、导航算法、视觉与AI算法等。
同时具备自主研发及生产制造机器人能力、多场景落地能力以及量产交付能力。
在与MagicLab研发负责人周扬及首席战略官Ivan的交流中,量子位获悉,该团队一心一意就一件事——
发力让机器人真正能实现“替人”,在特定商业场景中实现闭环落地。
包括在我们询问团队优势时,周扬也表示:
除了深耕技术研究,我们同样重视技术×商业的力量,不断地探索技术的应用场景、做好产品的工程化。
我们相信,随着灵巧手、人形机器人等通用本体的成熟量产,通用人形机器人一定也能获得商业价值上的正向反馈。
整个团队非常希望能够用机器人技术结合产业,把机器人的价值成指数级的放大。
并且,因为MagicLab觉得单纯做机器人设备公司,想象力过于有限,所以他们用“机器人 ”来对自己定位。
就像当年的互联网 一样,把技术带到千行百业,解决实际问题。
“超强磁场”背后的“超强团队”
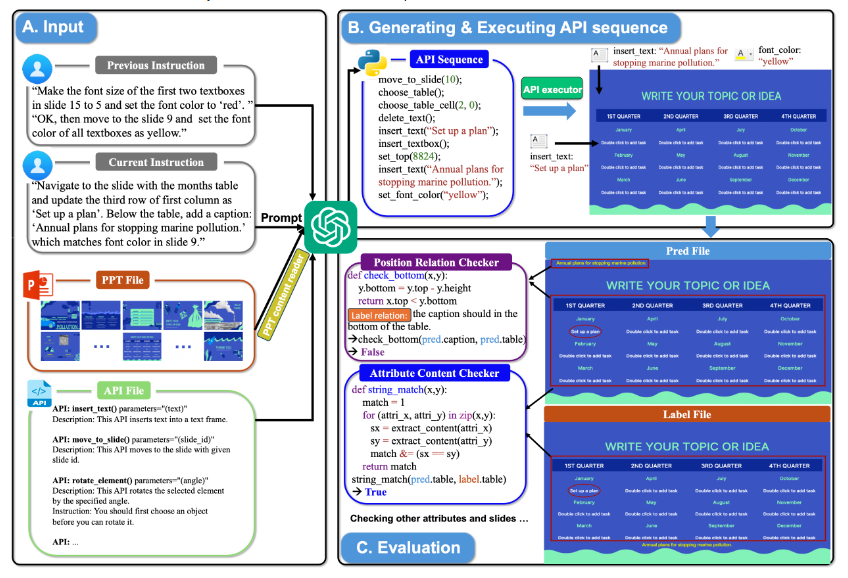
【人才故事】光明日报记者杨桐彤光明日报通讯员童文琦你能想象在我们身边有一个地方,它的磁场是周围磁场的60万倍,它的温度比周围温度低两百多摄氏度吗?这个地方就是位于北京市怀柔科学城内的极低温强磁场量子振荡测量实验站。0000北大推出首个多轮多模态PPT任务完成基准PPTC GPT-4完成正确率仅6%
要点:1.北大和微软亚洲研究院的研究人员提出了首个多轮多模态PPT任务完成基准PPTC,以评估大型语言模型在复杂多模态环境中的性能。2.评估表明,GPT-4是在创建新PPT文档任务中表现最强的模型,但仍然存在挑战,如错误累积、处理长PPT模板的能力差,以及多模态指令的复杂性。站长网2023-11-07 22:05:350000苹果因故意降低性能被判向部分用户赔偿
苹果公司因被指控“故意通过iOS软件更新降低设备性能”而被韩国首尔高等法院判决向七名韩国iPhone用户每人赔偿7万韩元,约合381元人民币。这起诉讼涉及超过6.2万名韩国iPhone用户,指控苹果通过软件更新故意降低旧款手机的性能,迫使用户购买新手机。站长网2023-12-06 16:09:220001小米汽车回应送北京牌照:消息完全失实
近日,有媒体报道称,小米前期员工透露,小米正在策划一项新政策,可能会为没有北京牌照的首批购买小米汽车的车主赠送牌照。然而,针对这一传闻,小米公司发言人迅速做出回应,明确表示:“完全失实。”小米公司发言人表示,小米汽车的定价、交付及销售政策均以官方发布为准,希望公众能够周知。这一回应直接否定了购买小米汽车会赠送北京牌照的传闻,让公众对小米公司的真实政策有了更清晰的了解。站长网2024-02-23 15:17:240000豆包再降价,字节“饱和式”进攻仍在继续
大模型应用大战即将一年整,竞争依然激烈。12月18日的火山引擎Force冬季大会上,字节跳动“豆包全家桶”又迎来了新成员。豆包视觉理解模型正式亮相,其具备更强的内容识别、理解和推理、视觉描述等能力;明年1月,豆包视频生成大模型也将面向企业开放服务。0000